Laboratorio di Informatica T (Ch9)
Funzione fprintf
Funzione fprintf
La funzione fprintf stampa con formattazione controllata:
L’interfaccia della funzione è:
FORMATè una stringa da stampareE1,E2sono espressioni (e.g. nomi di variabile)FORMATpuò contenere dei “segnaposto”, con il carattere%- E.g.
%fè un segnaposto per un valore reale - E.g.
%dè un segnaposto per un valore intero
- E.g.
- Il primo segnaposto è sostituito con il valore di
E1 - Il secondo segnaposto è sostituito con il valore di
E2, etc.
Funzione fprintf
Vediamo un esempio:
Stampa: A = 10.500000, B = 2.000000, A*B = 21.000000
- “
\n” è un carattere speciale e serve ad andare a capo
I segnaposto cono configurabili
Ci interessa un caso solo: “%.Nf” stampa un reale con N valori decimali
- E.g.
%.3fstampa con 3 cifre decimali - E.g.
%.1fstampa con 1 cifra decimale
Ciclo while
Ciclo while
Il ciclo for non è sempre adeguato ad implementare iterazioni:
- E.g. quando non è desiderabile limitare il numero di iterazioni a priori
Per questi casi, Matlab fornisce il ciclo
while
La sintassi è:
- Il corpo viene ripetuto…
- …Fintanto che
<espressione>denotatrue(o \(\neq 0\))
Funzione Zeta di Riemann
Consideriamo la funzione Zeta di Riemann ed il nostro vecchio codice:
\[\zeta(s) = \sum_{n=1}^\infty \frac{1}{n^s}\]
z = 0; % val. della somma
old_z = -Inf; % vecchio z
for n = 1:10000 % 1e5 = iterazioni massime
z = z + 1 ./ n.^s;
if abs(z - old_z) < 1e-6 % 1e-6 è la tolleranza
break % Interrompe il ciclo
end
old_z = z; % rimpiazzo il vecchio z
end- Cosa succede se 10000 iterazioni non bastano a convergere?
Funzione Zeta di Riemann
Consideriamo la funzione Zeta di Riemann ed il nostro vecchio codice:
\[\zeta(s) = \sum_{n=1}^\infty \frac{1}{n^s}\]
z = 0; % val. della somma
n = 1;
old_z = -Inf; % vecchio z
while abs(z - old_z) > 1e-6 % 1e-6 è la tolleranza
old_z = z; % memorizzo il vecchio z
z = z + 1 ./ n.^s;
n = n + 1; % incremento n
end- Fintanto che \(|z - old_z| > 1e-6\), il ciclo prosegue
Funzione Zeta di Riemann
Consideriamo la funzione Zeta di Riemann ed il nostro vecchio codice:
\[\zeta(s) = \sum_{n=1}^\infty \frac{1}{n^s}\]
z = 0; % val. della somma
n = 1;
old_z = -Inf; % vecchio z
while abs(z - old_z) > 1e-6 % 1e-6 è la tolleranza
old_z = z; % memorizzo il vecchio z
z = z + 1 ./ n.^s;
n = n + 1; % incremento n
end- Dobbiamo però gestire l’indice
nesplicitamente
Cicli Infiniti
Il ciclo while non fornisce garanzie di terminazione
Per esempio:
- Questo ciclo non termina
- Perché
nnon viene incrementato!
Se vi capita, niente panico: basta premere [CTRL+C]
- Capita più spesso di quanto ci si possa aspettare :-)
Equilibrio di Sistemi Tempo-Discreti
Equilibrio di Sistemi Tempo-Discreti
Consideriamo un sistema dinamico tempo-discreto
In generale è definito da una equazione del tipo:
\[x^{(t+1)} = f(x^{(t)})\]
Per questo tipo di sistemi, abbiamo imparato a:
- Osservare l’andamento dello stato del tempo
- Identificare il tipo di comportamento (convergente, periodico…)
- Per i sistemi convergenti, individuare uno stato di equilibrio…
- …Simulando sufficientemente a lungo e misurando lo stato finale
Gli stati di equilibrio, però, si possono determinare a priori!
Determinazione degli Stati di Equilibrio
Uno stato è di equilibrio se viene “trasformato in se stesso”
Formalmente, uno stato di equilibrio \(x\) deve soddisfare:
\[x = f(x)\]
- Manca l’indice di tempo, perché lo stato a sx e dx è lo stesso
Se risolviamo l’equazione, determiniamo gli stati di equilibrio
- In generale \(x\) è un vettore, quindi \(x = f(x)\) è un sistema di equazioni
- Se \(f(x)\) è lineare, possiamo usare la forma matriciale:
\[A x = b\]
E possiamo risolverlo con i metodi visti in analisi numerica
Un Esempio: Pagerank
Per l’algoritmo pagerank, visto la scorsa lezione
L’equazione fondamentale è data da:
\[x^{(t+1)} = p \underbrace{\frac{1}{n}}_{\text{vettore}} + (1-p) P x^{(t)}\]
Uguagliando \(x^{(t+1)}\) e \(x^{(t)}\) otteniamo:
\[I x = p \frac{1}{n} - (1-p) P x\]
\[\underbrace{(I - (1-p) P)}_{A} x = \underbrace{p \frac{1}{n}}_{b}\]
- \(A\) è quadrata per costruzione (deriva da una transizione di stato)
- Quindi, in casi normali, la soluzione è data da \(x = A^{-1} b\)
Un Esempio: Pagerank
Supponendo di disporre delle variabili:
p, per la probabilità di stancarsiP, per la matrice delle probabilità di clickn, per il numero delle pagine
Possiamo prima costruire la matrice \(A\) e la colonna \(b\):
A = (eye(n) - (1-p)*P) % eye e' la matrice identita'
b = (ones(n,1) * p/n) % ones(n,1) per avere una colonnaE quindi possiamo calcolare la soluzione con una divisione sinistra:
xeq = A \ bEquilibrio di Sistemi Tempo-Discreti Non Lineari
L’approccio è valido anche per sistemi dinamici non lineari
Uno stato, per essere di equilibrio, deve soddisfare:
\[x = f(x)\]
- I.e. la relazione che abbiamo già visto!
- …Che corrisponderà però \(x\) ad un sistema di equazioni non lineari
Ce ne occuperemo più avanti nel corso
Simulare o Non Simulare?
Quando risolvere un sistema di equazioni e quando simulare?
Simuliamo se:
- Ci interessa il comportamento nel tempo
- Il sistema non ha uno stato di equilibrio (e.g. periodico, caotico)
- Vogliamo determinare (empiricamente) la stabilità dell’equilibrio
- …
Risolviamo le equazioni se:
- Non ci interessa il comportamento nel tempo
- Non ci interessa la stabilità (basta uno stato di equilibrio)
- Se dobbiamo calcolare lo stato di equilibrio con alta precisione
- …
Stati di Equilibrio Multipli
Stati di Equilibrio Multipli
Un sistema dinamico tempo discreto lineare:
- Ha sempre un solo stato di equilibrio…
- …A meno che la matrice dei coefficienti non sia singolare
Per esempio, per le previsioni del tempo (scorsa lezione) avevamo:
\[\begin{align} x^{(t+1)} = P x^{(t)} \quad\text{ con }\quad P = \left(\begin{array}{cc} 0.9 & 0.5 \\ 0.1 & 0.5 \\ \end{array}\right) \end{align}\]
Da cui si ottiene il sistema:
\[(I - P) x = 0 \quad\text{ con }\quad \begin{aligned} (I-P) = \left(\begin{array}{cc} 0.1 & -0.5 \\ -0.1 & 0.5 \\ \end{array}\right) \end{aligned}\]
- Possiamo usare la funzione
detper calcolare il determinante:
Stati di Equilibrio Multipli
Cosa vuol dire in pratica?
- Un sistema sotto-determinato ha infinite soluzioni…
- …Quindi ci sono infiniti stati di equilibrio
Per esempio, supponiamo di avere due vasi comunicanti
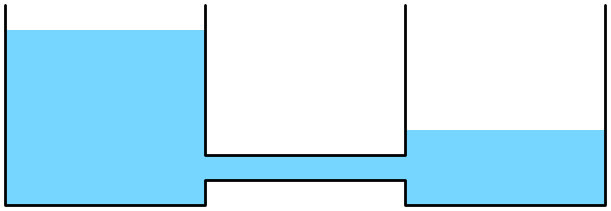
- Il livello finale dipende da quanta acqua c’è nel sistema!
- In questo specifico caso, lo stato raggiunto dipende dallo stato iniziale…
- …Altre volte, ci sono dei vincoli sottointesi
Esercizio: Previsioni del Tempo
Esercizio: Previsioni del Tempo
Nel caso delle previsioni del tempo:
Il tempo è bello o brutto, quindi la somma delle probabilità deve essere 1
- Partiamo dalle equazioni originali per l’equilibrio:
\[\begin{align} 0.1 x_g - 0.5 x_b = 0\\ -0.1 x_g + 0.5 x_b = 0 \end{align}\]
- Una delle due equazioni può essere rimossa…
- …Ma possiamo anche aggiungere \(x_g + x_b = 1\)
\[\begin{align} 0.1 x_g - 0.5 x_b = 0\\ x_g + x_b = 1 \end{align}\]
Nel file es_weather.m:
- Determinate lo stato di equilibrio risolvendo il sistema lineare
- Verificate che coincide con lo stato raggiunto dalla simulazione
Equilibrio di Sistemi Tempo-Continui Lineari
Equilibrio di Sistemi Tempo-Continui Lineari
Una stanza è ventilata mediante una sola apertura:
- Sia \(T_o\) temperatura esterna, \(T_a\) quella dell’aria interna
- Sia \(T_w\) la temperatura dei muri
Il flusso di calore tra l’esterno e l’aria è dato da:
\[i_1 = \frac{1}{R_1}(T_o - T_a)\]
- Dove \(R_1\) è la resistenza termica dell’apertura
Il flusso di calore tra l’aria e i muri è dato da:
\[i_2 = \frac{1}{R_2}(T_a - T_w)\]
- Dove \(R_1\) è la resistenza termica tra l’aria ed i muri
Equilibrio di Sistemi Tempo-Continui Lineari
Per quanto riguarda le temperature:
- La temperatura dell’esterno e dei muri si suppone costante
- La temperatura dell’aria varia con i flussi di calore
In particolare vale la relazione:
\[\frac{d T_a}{d t} = \frac{1}{C_a} (i_1 - i_2)\]
- Il flusso di calore \(i_1\) va dall’esterno all’aria, mentre \(i_2\) va dall’aria ai muri
- \(C_a\) è la capacità termica dell’aria
Per completezza, ricordiamo che:
\[\begin{align} i_1 &= \frac{1}{R_1}(T_o - T_a) & i_2 &= \frac{1}{R_2}(T_a - T_w) \end{align}\]
Equilibrio di Sistemi Tempo-Continui Lineari
Questo è un primo esempio di sistema dinamico tempo-continuo
I sistemi dinamici tempo continui sono descritti mediante equazioni differenziali
- Tipicamente, queste sono nella forma:
\[\dot{x} = f(x)\]
- Non sappiamo risolvere le equazioni differenziali…
- …Vedremo come farlo verso la fine del corso
Possiamo però già osservare che:
- Per definizione all’equilibrio lo stato non varia…
- …Il che vuol dire che le derivate si annullano
Il generale, un sistema tempo continuo all’equilibrio deve soddisfare:
\[f(x) = 0\]
Equilibrio di Sistemi Tempo-Continui Lineari
Nel nostro esempio abbiamo:
\[\begin{align} \frac{d T_a}{d t} &= \frac{1}{C_a} (i_1 - i_2) & i_1 &= \frac{1}{R_1}(T_o - T_a) & i_2 = \frac{1}{R_2}(T_a - T_w) \end{align}\]
Quindi, all’equilibrio avremo:
\[\begin{align} 0 &= \frac{1}{C_a} (i_1 - i_2) \\ i_1 &= \frac{1}{R_1}(T_o - T_a) \\ i_2 &= \frac{1}{R_2}(T_a - T_w) \end{align}\]
- È un sistema di equazioni lineari in \(i_1, i_2, T_a\)
E questo sappiamo come risolverlo!
Esercizio: Temperatura di una Stanza
Esercizio: Temperatura di una Stanza
Partiamo dal sistema originale:
\[\begin{align} 0 &= \frac{1}{C_a} (i_1 - i_2) \\ i_1 &= \frac{1}{R_1}(T_o - T_a) \\ i_2 &= \frac{1}{R_2}(T_a - T_w) \end{align}\]
- Le variabili sono \(i_1, i_2, T_a\)…
- …Ci conviene portarle a sx del segno =
Esercizio: Temperatura di una Stanza
Partiamo dal sistema originale:
\[\begin{align} \frac{1}{C_a} (i_1 - i_2) &=0 \\ i_1 + \frac{1}{R_1} T_a &= \frac{1}{R_1}T_o \\ i_2 - \frac{1}{R_2}T_a &= \frac{1}{R_2} T_w \end{align}\]
- Ora possiamo portarlo in forma matriciale
Esercizio: Temperatura di una Stanza
Partiamo dal sistema originale:
\[\left(\begin{array}{ccc} \frac{1}{C_a} & - \frac{1}{C_a} & \\ 1 & & \frac{1}{R_1} \\ & 1 & -\frac{1}{R_2} \\ \end{array}\right) \left(\begin{array}{c} T_a \\ i_1 \\ i_2 \end{array}\right) = \left(\begin{array}{c} 0 \\ \frac{1}{R_1}T_o \\ -\frac{1}{R_2}T_w \end{array}\right)\]
- Ogni riga è la trascrizione di una equazione
- Ogni colonna della matrice è associata ad una variabile…
- …Perché viene moltiplicata per tale variabile
Se chiamiamo la matrice \(A\) ed il termine noto \(b\), abbiamo:
\[A x = b\]
- Possiamo risolverlo con una divisione sinistra!
Esercizio: Temperatura di una Stanza
Partite dal file es_temperature.m nello start-kit
- Impostate la matrice dei coefficienti
- Impostate la colonna dei termini noti
- Risolvete il sistema per \(T_o = 17, T_w = 21\) e per \(T_o = 28, T_w = 21\)
- Stampate il valore di \(T_a\) all’equilibrio
Problemi di Interpolazione (Vincolata)
Problemi di Interpolazione (Vincolata)
Si vuole progettare una arcata a ridosso di una parete verticale
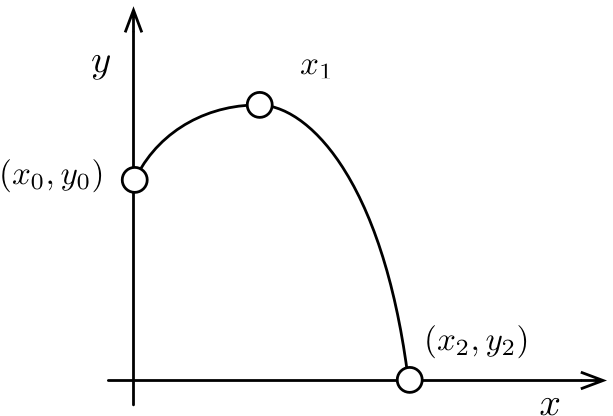
La curva che descrive l’arcata:
- Deve essere ancorata ad un punto noto \((x_0, y_0)\) sulla parete
- Deve essere ancorata ad un punto noto \((x_2, y_2)\) a terra
- Deve raggiungere l’altezza massima per \(x = x_1\) (con \(x_1\) noto)
Problemi di Interpolazione (Vincolata)
Un approccio: trattiamo la curva come una funzione \(f(x)\)
In questo modo possiamo tradurre le condizioni in equazioni:
- Deve essere ancorata ad un punto noto \((x_0, y_0)\) sulla parete
\[f(x_0) = y_0\]
- Deve essere ancorata ad un punto noto \((x_2, y_2)\) a terra
\[f(x_2) = y_2\]
- Deve raggiungere l’altezza massima per \(x = x_1\) (con \(x_1\) noto)
\[f'(x_1) = y_1\]
Così come sono ci dicono ben poco…
Tracciamento di Curve
Ci serve una assunzione sulla classe della funzione \(f(x)\)
Per esempio: \(f(x)\) è polinomiale. Formalmente:
\[f(x) = \sum_{i=0}^n \alpha_i x^i\]
Le nostre condizioni allora diventano:
\[\begin{align} & \text{passaggio per } (x_0, y_0) && \sum_{i=0}^n \alpha_i x_0^i = y_0 \\ & \text{passaggio per } (x_1, y_1) && \sum_{i=0}^n \alpha_i x_2^i = y_2 \\ & \text{annullamento di } f'(x_1) && \sum_{i=1}^n i \alpha_i x_1^{i-1} = 0 \end{align}\]
Tracciamento di Curve
Ci siamo quasi! Guardiamole meglio:
\[\begin{align} & \text{passaggio per } (x_0, y_0) && \sum_{i=0}^n \alpha_i x_0^i = y_0 \\ & \text{passaggio per } (x_1, y_1) && \sum_{i=0}^n \alpha_i x_2^i = y_2 \\ & \text{annullamento di } f'(x_1) && \sum_{i=1}^n i \alpha_i x_1^{i-1} = 0 \end{align}\]
Quali sono le incognite?
- Sono i parametri della funzione \(\alpha_i\) e non le \(x\)!
Che grado di polinomio ci serve?
- Tre condizioni \(\Rightarrow\) tre variabili, i.e. \(\alpha_0, \alpha_1, \alpha_2\) \(\Rightarrow\) secondo grado
Tracciamento di Curve
In questo modo otteniamo il sistema:
\[\begin{align} \alpha_2 x_0^2 + \alpha_1 x_0 + \alpha_0 &= y_0 \\ \alpha_2 x_2^2 + \alpha_1 x_2 + \alpha_0 &= y_2 \\ 2 \alpha_2 x_1 + \alpha_1 &= 0 \end{align}\]
- Che è lineare nelle incognite \(\alpha_2, \alpha_1, \alpha_0\)
La tecnica vista è un metodo generale per progettare curve:
- Si ipotizza una struttura per la curva da costruire (e.g. polinomio)
- Si traducono i vincoli del problema in equazioni
- Si risolvono le equazioni per determinare i parametri
- Per ora consideriamo il caso in cui le equazioni sono lineari
Esercizio: Progettazione di un’Arcata
Esercizio: Progettazione di un’Arcata
Consideriamo il sistema per il problema di progettazione dell’arcata:
\[\begin{align} \alpha_2 x_0^2 + \alpha_1 x_0 + \alpha_0 &= y_0 \\ \alpha_2 x_2^2 + \alpha_1 x_2 + \alpha_0 &= y_2 \\ 2 \alpha_2 x_1 + \alpha_1 &= 0 \end{align}\]
A partire dal file es_arc.m nello start-kit:
- Si determinino i coefficienti della curva risolvendo il sistema
- Si disegni la forma dell’arcata
- Si stampi a video il valore dell’altezza massima
Esercizio: Letto di un Fiume
Esercizio: Letto di un Fiume
Si vuole progettare lo scavo per il letto di un fiume
La sezione dello scavo deve presentarsi come segue:
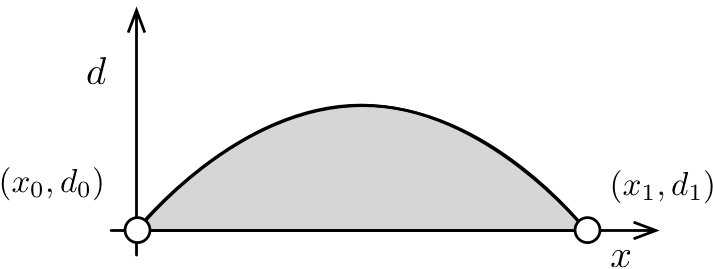
- La coordinata \(x\) rappresenta una posizione orizzontale
- La coordinata \(d\) rappresenta la profondità dello scavo
- Per questa ragione la sezione si presenta “al contrario”
Esercizio: Letto di un Fiume
Si vuole progettare lo scavo per il letto di un fiume
- La sezione deve essere descritta da una curva parabolica
- Deve passare per i punti noti \((x_0, y_0)\) e \((x_1, y_1)\)
- L’area della sezione determina la portata massima…
- …E deve essere pari ad un valore prestabilito \(s_1\)
Se \(f(x)\) è la funzione che descrive la curva, l’area della sezione è:
\[S = \int_{\underbrace{x_0}_{= 0}}^{x_1} f(x) \, dx\]
A partire dal file es_riverbed.m nello start-kit:
- Si determinino i coefficienti della curva
- Si disegni la forma della sezione
Esercizio: Controllo di Accelerazione
Esercizio: Controllo di Accelerazione
Si vuole controllare l’accelerazione di un carrello automatico
Il profilo di velocità in accelerazione deve presentarsi come segue:
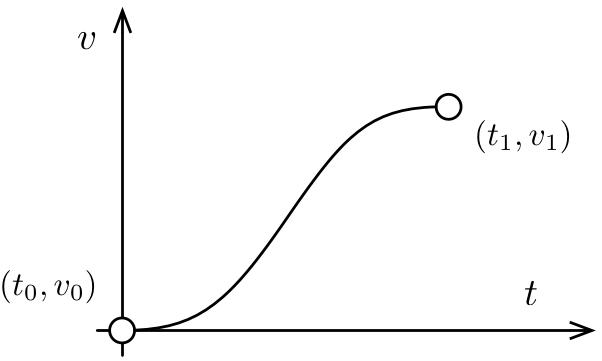
- La coordinata \(t\) rappresenta il tempo
- La coordinata \(v\) rappresenta la velocità
Curve di questo tipo si utilizzano nelle centraline di controllo di auto e moto
Esercizio: Controllo di Accelerazione
Si vuole controllare l’accelerazione di un carrello automatico
- Il profilo deve seguire un andamento polinomiale
- Il grado del polinomio è da determinare
- Servirà un coefficiente per ogni condizione specificata
- La velocità iniziale e finale ed il tempo di accelerazione \(t_1\) sono noti
- Perché le variazioni non siano troppo brusca…
- …Si richiede che la derivata della velocità in \(t_0\) e \(t_1\) sia nulla
A partire dal file es_acceleration.m nello start-kit:
- Si determinino i coefficienti della curva
- Si disegni il profilo della velocità in accelerazione
Esercizio: Controllo di Frenata
Esercizio: Controllo di Frenata
Si vuole controllare l’arresto di un carrello automatico
Il profilo di velocità in frenata deve presentarsi come segue:
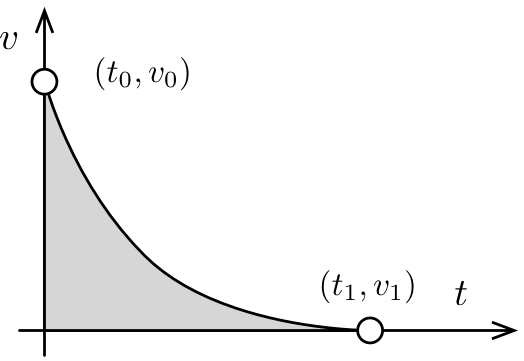
- La coordinata \(t\) rappresenta il tempo
- La coordinata \(v\) rappresenta la velocità
Possiamo usare la curva per programmare una centralina di controllo
Esercizio: Controllo di Frenata
Si vuole controllare l’arresto di un carrello automatico
- Il profilo è dato da un polinomio, di grado da determinare
- La velocità iniziale e finale ed il tempo di frenata \(t_1\) sono noti
- Si richiede che la derivata della velocità in \(t_1\) sia nulla
- Lo spazio di frenata \(S\) deve essere pari ad un valore \(s_1\), dove:
\[S = \int_{\underbrace{t_0}_{=0}}^{t_1} f(t) \, dt\]
A partire dal file es_brake.m nello start-kit:
- Si determinino i coefficienti della curva
- Si disegni il profilo della velocità in frenata
Esercizio: Progettazione di un Telaio
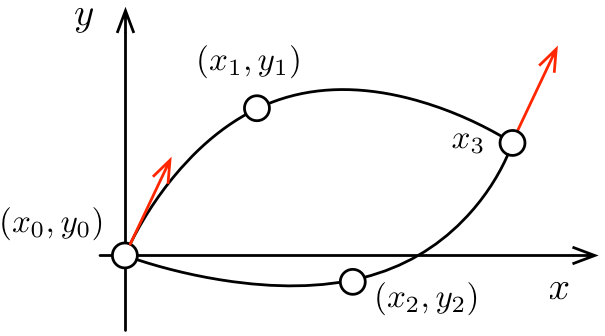
Esercizio: Progettazione di un Telaio
Si vuole progettare un telaio per una bicicletta
La forma del telaio deve apparire come segue:
Esercizio: Progettazione di un Telaio
Si vuole progettare un telaio per una bicicletta
- La forma del telaio è descritta da due curve paraboliche \(f_1\) ed \(f_2\)
- Le due curve originano in un punto comune \((x_0 y_0)\)
- La curva \(f_1\) deve passare per l’ancoraggio della sella in \((x_1, y_1)\)
- La curva \(f_2\) deve passare per l’ancoraggio dei pedali in \((x_2, y_2)\)
- Le due curve devono congiungersi in un punto \((x_3, y_3)\)…
- …Di cui è nota solo la coordinata \(x_3\)
- Le derivate di \(f_1\) in \(x_0\) ed \(f_2\) in \(x_3\) devono essere uguali
Esercizio: Progettazione di un Telaio
A partire dal file es_frame.m nello start-kit:
- Si determinino i coefficienti delle due curve
- Si disegni il profilo del telaio
Attenzione:
Ci sono due condizioni che coinvolgono entrambe le curve:
- Le due curve devono congiungersi in un punto \((x_3, ???)\)
- Le derivate di \(f_1\) in \(x_0\) ed \(f_2\) in \(x_3\) devono essere uguali
Non possono essere formulate separatamente!
- Occorrerà definire un’unico sistema di equazioni…
- …in cui compaiono sia \(f_1(x)\) che \(f_2(x)\)