Laboratorio di Informatica T (Ch8)
Funzioni come Argomento
Approssimazione di una Derivata
Consideriamo questo problema di derivazione numerica:
- Data una generica funzione \(f: \mathbb{R} \mapsto \mathbb{R}\)…
- …Possiamo calcolare \(f'(x)\)?
Approssimazione di una Derivata
Consideriamo questo problema di derivazione numerica:
- Data una generica funzione \(f: \mathbb{R} \mapsto \mathbb{R}\)…
- …Possiamo calcolare \(f'(x)\)?
Consideriamo due casi:
- Se \(x\) non è noto, non è facile capire cosa fare
- Ma se \(x\) è noto (i.e. \(x = 1\)), allora sappiamo che:
\[f'(x) = \lim_{h \rightarrow 0} \frac{f(x+h) - f(x)}{h}\]
A questo punto:
- Se consideriamo un \(h\) molto piccolo…
- …Dovremmo ottenere una approssimazione decente
Scelta di \(h\)
Idealmente:
- Il valore di \(h\) dovrebbe essere più piccolo possibile…
- …Quindi \(h = \varepsilon\), con $= $ il più piccolo numero rappresentabile
In realtà non è una grande idea:
- Tende a generare errori di cancellazione
- Molto meglio usare questo secondo approccio:
\[h = \left\{\begin{aligned} & \sqrt{\varepsilon} x & \text{ if } |x| > tol \\ & \sqrt{\varepsilon} & \text{ altrimenti} \end{aligned} \right.\]
- Dove \(tol\) è un valore di tolleranza
Proviamo a Codificarlo
Proviamo ad abbozzare una implementazione:
function df = derive(...)
if abs(x) > 1e-6 % Scelta di h
h = sqrt(eps) * x;
else
h = sqrt(eps)
end
df = 1/h * (f(x+h) - f(x)) % Calcolo della derivata
else- Un parametro è
x(il punto per cui calcolare la derivata)…
Proviamo a Codificarlo
Proviamo ad abbozzare una implementazione:
function df = derive(...)
if abs(x) > 1e-6 % Scelta di h
h = sqrt(eps) * x;
else
h = sqrt(eps)
end
df = 1/h * (f(x+h) - f(x)) % Calcolo della derivata
else- …Ma il secondo parametro è
fstessa!
Alcuni algoritmi utilizzano funzioni come parametri
Funzioni come Parametri
In Matlab si può fare:
In derive, trattiamo un parametro come un nome di funzione
function df = derive(f, x)
if abs(x) > 1e-6 % Scelta di h
h = sqrt(eps) * x;
else
h = sqrt(eps)
end
df = 1/h * (f(x+h) - f(x)) % Calcolo della derivata
else- Notate che stiamo invocando
f(si riconosce dalla parentesi) fè una variabile locale, che contiene una funzione
Funzioni come Parametri
In Matlab si può fare:
Da qualche parte dobbiamo definire \(f\):
Quando invochiamo derive (e.g. con \(x=1\)) non possiamo usare:
- Se lo facciamo, Matlab crede che vogliamo eseguire
f… - …Mentre noi vogliamo solo passarlo!
Funzioni come Parametri
In Matlab si può fare:
Da qualche parte dobbiamo definire \(f\):
Quando invochiamo derive dobbiamo usare una sintassi speciale:
- La
@dice a Matlab chefnon va eseguita… - …Ma va “passata così com’è”
Funzioni come Parametri
Complessivamente abbiamo:
derive(f, 1) % Invocazione
function y = f(x) % Funzione da derivare
y = ...
end
function df = derive(f, x) % Approssimazione della derivata
df = ...
endCome al solito, trovate il codice nello start-kit
Funzioni Anonime
Funzioni Anonime
Supponiamo di vole derivare:
\[f(x) = x^2 \log x\]
- A rigore, dovremmo definire:
- Si può fare, ma è scomodo per una funzione così semplice!
Matlab ci fornisce un costrutto più compatto: le funzioni anonime
Funzioni Anonime
Si tratta di un modo alternativo per definire una funzione
La sintassi è:
@(<p1>, <p2>, ...) <espressone>Il costrutto restituisce una funzione senza nome:
<p1>,<p2>… sono i parametri formali- La funzione denota il valore di
<espressione>
Si può memorizzare la funzione in una variabile, e.g.:
- Inserisce nella variabile
f… - …Una funzione che, quando invocata, restituisce
x^2
Funzioni Anonime
In prima battuta, potremmo pensare di scrivere:
In realtà, non funziona!
- La ragione è che
fè già una variabile che contiene una funzione - Quindi non c’è bisogno di dirlo di nuovo a Matlab
La forma corretta è quindi semplicemente:
Funzioni Anonime ed Ambienti
Funzioni Anonime ed Ambienti
A differenza della funzioni “normali”…
Le funzioni anomime hanno accesso alle variabili dell’ambiente in cui sono definite
Per esempio:
- Una funzione “normale” potrebbe accedere solo ad
x(il parametro) - Una funzione anonima può accedere anche ad
a!
Un Caso d’Uso Importante
Consideriamo ancora l’oscillatore (discretizzato) di Van Der Pol:
\[\begin{align} x^{(t+1)} &= x^{(t)} + h y^{(t)} \\ y^{(t+1)} &= y^{(t)} + h \left(\mu (1 - x^{(t)2})y^{(t)} - x^{(t)}\right) \\ \end{align}\]
…Ed il suo codice di simulazione:
X = [];
T = 1:1000; % Istanti di tempo
xc = [x0, y0]; % Stato iniziale
for t = T
X(t, :) = xc; % Salvo lo stato corrente
xc = f(xc, h, mu); % Genero lo stato futuro
end- Lo abbiamo usato in tutti gli esercizi seguenti, e non è buona cosa
Funzioni come Argomenti
Per essere “puliti”, dovremmo definire una funzione
Per prima cosa, incapsuliamo il codice in una nuova funzione:
Funzioni come Argomenti
Per essere “puliti”, dovremmo definire una funzione
Quindi, identifichiamo i parametri:
function X = simulate(..., T, ...)
X = [];
xc = [x0, y0];
for t = T
X(t, :) = xc;
xc = f(xc, h, mu);
end
end- È bene che
Tsia un parametro… - …Così possiamo definirlo al momento della chiamata
Funzioni come Argomenti
Per essere “puliti”, dovremmo definire una funzione
Quindi, identifichiamo i parametri:
- Lo stesso vale per lo stato iniziale
X0… - …Ed a maggior ragione per la funzione di transizione
f
Funzioni come Argomenti
Per essere “puliti”, dovremmo definire una funzione
Ci rimane ancora un problema:
function X = simulate(f, T, X0)
X = [];
xc = X0;
for t = T
X(t, :) = xc;
xc = f(xc, h, mu); % <--- QUI!!
end
endhemusono specifici per il nostro oscillatore…- Finché appaiono nel codice, la nostra
simulatenon è davvero generica
Funzioni come Argomenti
Soluzione 1: includere h e mu nella definizione della funzione
function X = simulate(f, T, X0)
X = [];
xc = X0;
for t = T
X(t, :) = xc;
xc = f(t, xc); % Passo solo lo stato
end
end- Passo anche il tempo
t, è utile per alcuni sistemi… - …E non è specifico di un particolare sistema
Funzioni come Argomenti
Soluzione 1: includere h e mu nella definizione della funzione
A parte avremo:
Funzioni come Argomenti
Soluzione 1: includere h e mu nella definizione della funzione
Nel complesso, potremmo avere:
T = 1:300;
X0 = [0.5, 0.5];
X = simulate(@vdp, T, X0); % Funzione come valore
function xf = vdp(t, xc)
...
endFunziona, ma ha dei grossi difetti:
hemusono hard-coded nella funzionevdp…- …Se vogliamo provare valori diversi, dobbiamo ridefinire la funzione!
Funzioni Anonime e Funzioni Normali
Soluzione 2: usare una funzione anonima
Partiamo dalla versione corrente del codice:
Funzioni Anonime e Funzioni Normali
Soluzione 2: usare una funzione anonima
Ridefiniamo vdp in modo che riceva solo i parametri appropriati
Funzioni Anonime e Funzioni Normali
Soluzione 2: usare una funzione anonima
Definiamo una funzione anonima con l’interfaccia richiesta da simulate…
Funzioni Anonime e Funzioni Normali
Soluzione 2: usare una funzione anonima
…E che non faccia altro che chiamare vdp
Funzioni Anonime e Funzioni Normali
Soluzione 2: usare una funzione anonima
function es_vdp()
h = 0.1; % Spostato
mu = 1; % Spostato
T = 1:300;
X0 = [0.5, 0.5];
f = @(x, t) vdp(x, h, mu); % Chiama solo vdp!
X = simulate(@vdp, T, X0);
endQuando f viene eseguita, invoca vdp(x, h, mu)
xè uno dei parametri dif, mahemuno- Matlab li cerca nell’ambiente in cui
fè definita!
Un Pattern
Useremo molto spesso le funzioni anonime in questo modo:
- Così
ftransitionha solo i suoi parametri “naturali”… - La funzione anonima
fla “avvolge” (fa da wrapper)… - …Ed espone l’interfaccia richiesta da
simulate
Come al solito, trovate il codice nello start-kit
Es.: Oscillatore di Van Der Pol Forzato
Esercizio: Oscillatore di Van Der Pol Forzato
Consideriamo una variante dell’oscillatore di Van Der Pol
In particolare, vediamo la versione discretizza e “forzata”:
\[\begin{align} x^{(t+1)} &= x^{(t)} + h y^{(t)} \\ y^{(t+1)} &= y^{(t)} + h \left(\mu (1 - x^{(t)2})y^{(t)} - x^{(t)} - A \sin(\omega h t) \right) \\ \end{align}\]
Il termine \(A \sin(\omega h t)\) si dice guida (driver):
- \(A\) è l’ampiezza dell’oscillazione guida
- \(\omega\) è la sua frequenza
- \(t\) è il tempo
- \(h\) compare perché il tempo è discretizzato
Il valore della guida non dipende dallo stato, ma solo dal tempo
Oscillatore di Van Der Pol Forzato
Partendo dal file es_forced_vdp.m nello start-kit:
- Definite la funzione di transizione per l’oscillatore forzato:
- Aggiungete il codice di simulazione
- Aggiungete una funzione anonima, se necessario
Confrontate i risultati con l’oscillatore “normale” (in es_dp.m):
- Disegnate l’andamento di \(x\) nel tempo
- Disegnate la traiettoria (i.e. insieme dei valori di \(x\) e \(y\) visitati)
Come differiscono i due andamenti? E le due traiettorie?
Esercizio: Random Walk
Esercizio: Random Walk
Ricordate il nostro esempio di random walk 1D?
Formalmente, era caratterizzato dalla ricorsione:
\[x^{(t+1)} = x^{(t)} + d\]
- Dove:
\[d = \left\{\begin{aligned} & +1 & \text{ con probabilità } p \\ & -1 & \text{ altrimenti} \end{aligned}\right.\]
Nel file es_walk.m è definita la funzione di transizione, con interfaccia:
- Simulate il sistema utilizzando
simulate- Aggiungete una funzione anonima (se necessario)
- Stampate a video la posizione finale
- Disegnate l’andamento della posizione nel tempo
Esercizio: Random Walk Multiple
Esercizio: Random Walk Multiple
La nostra random walk è un esempio di sistema stocastico
- Il comportamento è soggetto ad incertezza
- Ogni simulazione può avere un esito diverso
Ma in media come si comporta il sistema?
Per determinarlo possiamo:
- Simulare molte volte il sistema…
- …E quindi studiare i risultati
Per esempio possiamo:
- Calcolare la posizione finale media
- Disegnare un istogramma
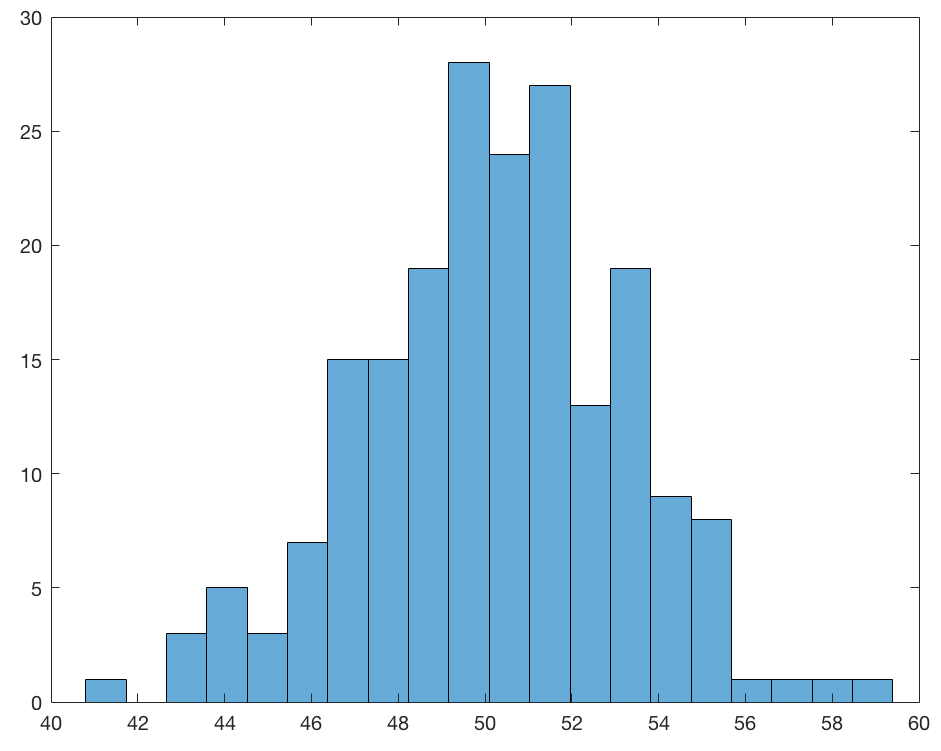
Istogrammi
Un istogramma è un grafico che si ottiene nel modo seguente:
- Dato una collezione di valori \(x_i\)
- Si divide il dominio \(D\) in intervalli uguali
- Si conta quanti valori \(x_i\) cadono in ciascun intervallo
- Per ogni intervallo, sia \(c_j\) il valore del conteggio
- Si disegnano su un grafico a barre i valori di \(c_j\)
Istogrammi
Un esempio (l’altezza di un neonato, campione di 200 valori)
Istogrammi
Un istogramma è un grafico che si ottiene nel modo seguente:
- Dato una collezione di valori \(x_i\)
- Si divide il dominio \(D\) in intervalli uguali
- Si conta quanti valori \(x_i\) cadono in ciascun intervallo
- Per ogni intervallo, sia \(c_j\) il valore del conteggio
- Si disegnano su un grafico a barre i valori di \(c_j\)
In Matlab potete usare:
- Di default, Matlab calcola da solo quali intervalli usare
Esercizio: Random Walk Multiple
Nel file es_many_walks.m
- Simulare la nostra random walk \(N\) volte
- Memorizzare in un vettore tutte le posizioni finali raggiunte
- Disegnare un istogramma
Come varia l’istogramma al variare di \(p\)?
Esercizio: arrayfun
Esercizio: arrayfun
Matlab fornisce la funzione:
- Che applica la funzione
fad ogni elemento nel vettorex… - …E restituisce i risultati in
y
Nel file es_arrayfun.m si definisca una funzione:
…Che replichi il comportamento di quella di Matlab
- La funzione \(f\) da utilizzare per il testing è fornita nello start-kit
- Si disegni il grafico di \(f\) nell’intervallo \([-2, 2]\)
Esercizio: Random Surfer
Esercizio: Random Surfer
Consideriamo un semplice modello per un utente web
Il nostro utente si comporta così:
- Parte da una pagina scelta uniformemente a caso
- Ad ogni passo:
- Con probabilità \(1-p\) l’utente clicca su un link a caso
- Con probabilità \(p\) l’utente si stanca…
- …E ricomincia da una pagina a caso
- Se non ci sono link in uscita, l’utente resta fermo
Esercizio: Random Surfer
Consideriamo un semplice modello per un utente web
Possiamo descrivere la rete come un grafo, e.g.:
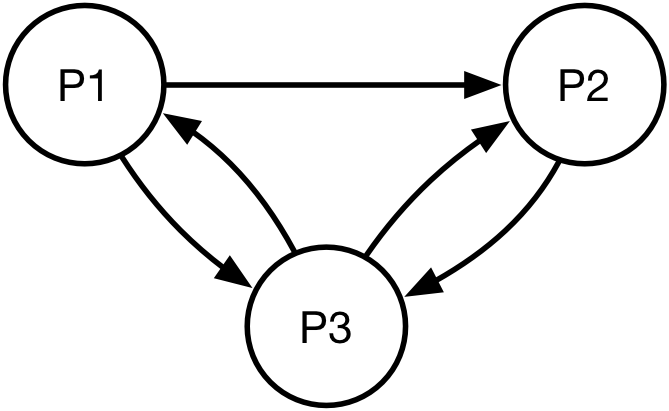
- I nodi (i.e. le palline) rappresentano pagine
- Gli archi (i.e.) le freccette rappresentano i link
- Supponiamo di avere \(n\) pagine
- Chiamiamo \(P_{i,j}\) la probabilità di cliccare sul link da \(j\) a \(i\)
- Quindi, \(P_{i,j} = 1 / (\text{num. link in uscita da } j)\)
Esercizio: Random Surfer
Proviamo a tradurlo in equazioni
Per lo stato, facciamo una scelta un po’ strana:
- Una variabile \(x_i\) per ogni pagina, con \(x_i \in [0, 1]\)
- \(x_i\) rappresenta la probabilità che l’utente sia sulla pagina \(i\)
All’inizio, tutte le pagine sono equiprobabili:
- Quindi, per tutte le pagine \(x_i = 1/n\)
Esercizio: Random Surfer
Proviamo a tradurlo in equazioni
Calcolare lo stato futuro vuol dire:
- A partire delle probabilità \(x_i^{(t)}\) di essere sulla pagina \(i\)…
- …Calcolare le probabilità future \(x_i^{(t+1)}\)
Formalmente, la probabilità \(x_i^{(t)}\) di essere su \(i\) al passo \(t+1\):
\[x_i^{(t+1)} = \underbrace{p}_{\text{mi stanco}} \overbrace{\frac{1}{n}}^{\text{reset}} + \underbrace{(1-p)}_{\text{non mi stanco}} \sum_{j = 1}^n \overbrace{x_j^{(t)}}^{\text{sono su $j$}} \underbrace{P_{i,j}}_{\text{link per $i$}}\]
- È data dalla probabilità di finire su \(i\) dopo essersi stancati…
- …Più la probabilità di non stancarsi e finire su \(i\) da un’altra pagina
Esercizio: Random Surfer
Se ci fate caso, la funzione di transizione è lineare
Per i sistemi dinamici lineari, è comodo usare la notazione matriciale:
\[x^{(t+1)} = p \frac{1}{n} + (1-p) P x^{(t)}\]
- \(x^{(t+1)}\) è il vettore (colonna) delle probabilità al tempo \(t+1\)
- \(x^{(t)}\) è il vettore (colonna) delle probabilità al tempo \(t\)
- \(P\) è la matrice con le probabilità di transizione \(P_{i,j}\)
Vogliamo definire un simulatore per il modello appena visto
Esercizio: Random Surfer
Il file es_surfer.m nello start-kit:
Definisce la funzione:
..Che implementa la ricorsione:
\[x^{(t+1)} = p \frac{1}{n} + (1-p) P x^{(t)}\]
- La formula matriciale assume che \(x^{(t)}\) sia una colonna…
- …Mentre il vettore di stato è una riga
- Questo rende necessarie alcune trasposizioni
Definite il codice di simulazione:
- Disegnate su un’unica figure l’andamento di \(x_0\), \(x_1\), \(x_2\) nel tempo
- Quali sono alla fine le pagine su cui è più probabile trovarsi?
Esercizio: Random Surfer
Le probabilità finali:
- Rappresentano la probabilità di visita delle pagine
- Si potrebbero usare per capire quali pagine sono più importanti
È esattamente quello per cui il modello di esempio è nato!
Sapete chi l’ha inventato?

BTW: l’algoritmo si chiama pagerank
Esercizio: Previsioni del Tempo
Esercizio: Previsioni del Tempo
Vogliamo utilizzare un sistema dinamico per prevedere il tempo
Supponiamo che (sommariamente) valgano le regole seguenti:
- Se un giorno c’è bel tempo
- Il giorno successivo sarà bello con il 90% di probabilità
- Il giorno successivo sarà brutto con il 10% di probabilità
- Se un giorno c’è brutto tempo
- Il giorno successivo sarà bello con il 50% di probabilità
- Il giorno successivo sarà brutto con il 50% di probabilità
Esercizio: Previsioni del Tempo
Per lo stato, ragioniamo di nuovo in termini di probabilità:
- \(x_g^{(t)}\) = probabilità che il tempo sia bello a \(t\)
- \(x_b^{(t)}\) = probabilità che il tempo sia brutto a \(t\)
Per le transizioni, avremo:
\[\begin{align} x_g^{(t+1)} = x_g^{(t)} P_{g,g} + x_b^{(t)} P_{g,b} \\ x_b^{(t+1)} = x_g^{(t)} P_{b,g} + x_b^{(t)} P_{b,b} \end{align}\]
- \(P_{g,b}\) è la probabilità che il tempo sia brutto a \(t\) e bello a \(t+1\), etc.
- Il sistema è di nuovo lineare. In forma matriciale possiamo scrivere:
\[x^{(t+1)} = P x^{(t)} \quad \text{ con: } P = \left(\begin{array}{cc} P_{g,g} & P_{g,b} \\ P_{b,g} & P_{b,b} \\ \end{array}\right) \]
Esercizio: Previsioni del Tempo
Si parta dal file es_weather.m nello start-kit
Si definisca la funzione di transizione:
- Dove
xcè lo stato corrente (\(x_g^{(t)}, x_b^{(t)}\))… - …E
Pè la matrice \(P\) di transizione… - …Che deve essere definita come parte dell’esercizio
Si sviluppi il codice di simulazione:
- Si disegni l’andamento delle due probabilità (bel tempo/brutto tempo)
- Nel codice, si assume inizialmente che il primo giorno sia brutto
- In un secondo momento, provate l’alternativa opposta
Esercizio: Crescita Logistica
Esercizio: Crescita Logistica
Sia data una popolazione che segue il modello logistico
\[x^{(t+1)} = r\, ^{(t)} \left(1 - \frac{x^{(t)}}{N}\right)\]
Dove:
- \(r\) indica il tasso di crescita (deve valere \(r > 1\))
- \(N\) indica un valore di popolazione…
- …che, se raggiunto, ne causa il collasso immediato
Vogliamo studiare il comportamento del modello mediante simulazione
Esercizio: Crescita Logistica
A partire dal file es_logi.m nello start-kit:
Definite la funzione di transizione:
- Che calcoli lo stato futuro
xf - …A partire da quello corrente
xc, e dai valori direk
Definite il codice di simulazione:
- Lo stato iniziale è definito nel codice (e così l’intervallo di simulazione)
- Valori di partenza per
reksono definiti nel codice - Si disegni l’andamento dello stato nel tempo
- Si esplori cosa succede per vari valori di \(r\), da \(1.1\) a \(4.0\)
Esercizio: Un Modello Preda-Predatore
Esercizio: Un Modello Preda-Predatore
I modelli preda-predatore:
- Rappresentano la co-evoluzione di due popolazioni antagoniste
- E.g. prede-predatori, ma anche reazioni chimiche che si ostacolano
Tipicamente ci sono due elementi nel vettore dello stato:
- Il numero di “prede” \(H\)
- Il numero di “predatori” \(P\)
Simulando il sistema:
- Si può studiare il comportamento delle due popolazioni
- Si può verificare se vi sia un equilibrio stabile
Esercizio: Un Modello Preda-Predatore
Consideriamo questo modello preda-predatore:
\[\begin{align} & H^{(t+1)} = \overbrace{r \left(1 - \frac{H^{(t)}}{k} \right) H^{(t)}}^{\text{crescita logistica}} - \overbrace{s\, H^{(t)} P^{(t)}}^{\text{prede eliminate}} \\ & P^{(t+1)} = \underbrace{u\, P^{(t)}}_{\text{calo in assenza di prede}} + v \underbrace{\left( s\, H^{(t)} P^{(t)} \right)}_{\text{prede eliminate}} \end{align}\]
- \(k\) è la massima popolazione di prede sostenibile
- \(s\) è la frazione di \(H^{(t)}\) che un predatore può “mangiare”
- \(u < 1\) è il ritmo di scomparsa dei predatori in assenza di prede
- \(v\) è il “bonus riproduttivo” per ogni preda “mangiata”
Esercizio: Un Modello Preda-Predatore
Nello start-kit, partite dal file es_logi_pp.m
Implementare la funzione di transizione:
- HP:
xc(1)sia il numero di prede exc(2)quello di predatori - I valori di \(r, k, s, u, v\) sono già definiti nel codice
Definite il codice di simulazione nella funzione principale:
- Lo stato iniziale è riportato nel codice
- Disegnate l’andamento delle due popolazioni nel tempo
- Disegnate la traiettoria nello spazio degli stati
Esercizio: Un Modello Preda-Predatore
Provate a fare delle variazioni!
Aumentate e diminuite (solo) \(s\):
- Cosa vi aspettate che succeda? Cosa succede?
Aumentate e diminuite (solo) \(r\):
- Cosa vi aspettate che succeda? Cosa succede?
Aumentate e diminuite (solo) \(u\):
- Cosa vi aspettate che succeda? Cosa succede?
Riuscite a spiegare intuitivamente le ragioni?
Esercizio: Gigi l’Ubriaco
Esercizio: Gigi l’Ubriaco
Dopo una serata di bagordi, Gigi deve tornare a casa a piedi
- All’inizio, Gigi si muove in una data direzione (verso casa)
- Ad ogni passo, Gigi mantiene la direzione con probabilità \(p\)
- Oppure cambia direzione, con probabilità \(1-p\)
Intuitivamente \(p\) controlla il livello di sobrietà
- Con \(p = 1\) Gigi è sobrio: cammina sicuro verso casa
- Con \(p = 0.5\) Gigi ha bevuto più di qualche bicchiere di troppo…
Vogliamo osservare il moto di Gigi nel tempo
- Lo faremo modellando il moto come un sistema dinamico
- Usiamo un approccio stocastico (numeri pseudo-casuali)
Esercizio: Gigi l’Ubriaco
Cosa è lo stato \(x^{(t)}\) per il nostro problema?
Lo \(X^{(t)}\) deve contenere abbastanza informazioni per determinare \(X^{(t+1)}\)
- Quindi ci serve la posizione di Gigi
- Ma anche la direzione dell’ultimo movimento!
Lo stato è un vettore di due componenti:
\[X = (x, d)\]
…E vale la ricorsione:
\[\begin{align} & d^{(t+1)} = \left\{\begin{aligned} & d^{(t)} & \text{ con probabilità } p \\ & -d^{(t)} & \text{ altrimenti } \end{aligned}\right.\\ & x^{(t+1)} = x^{(t)} + d^{(t+1)} \end{align}\]
Esercizio: Gigi l’Ubriaco
A partire dal file es_drunkard.m nello start-kit:
Definite la funzione di transizione:
- HP:
xc(1)= posizione,xc(2)direzione dell’ultimo spostamento
Simulate l’andamento della posizione di Gigi nel tempo:
- Visualizzate come si evolve lo stato nel tempo
- L’andamento sembra più o meno realistico della nostra random walk originale?
- Cosa succede cambiando \(p\)?
Esercizio: Provaci ancora, Gigi!
Esercizio: Provaci ancora, Gigi!
Proviamo a studiare il “comportamento medio” di Gigi:
Nel file es_many_drunkards.m, come nel caso della random walk:
- Simulare \(N\) camminate
- Memorizziamo in un vettore tutte le posizioni finali raggiunte
- Disegniamo un istogramma
Come varia l’istogramma al variare di \(p\)?
Esercizio: Trovare Elementi in un Vettore
Esercizio: Trovare Elementi in un Vettore
Nel file di funzione es_findidx.m, definire la funzione:
function I = my_findidx(X, V)- Con
Xscalare eVvettore, che restituisca nel vettoreI… - …Gli indici degli elementi che in
Vsono uguali aX
Per esempio:
- Si implementi la funzione utilizzando un ciclo
for
Esercizio: Trovare Elementi in un Vettore
Si verifichi la correttezza nella funzione principale es_findidx:
- Si utilizzino dei vettori di numeri interi casuali, ottenuti con
randi
Come ottenere lo stesso risultato con le funzioni predefinite?
- Si determini un metodo e lo si sfrutti per fare un confronto
- Suggerimento: vi ricordate della funzione
find?
Esercizio: Prodotto Matriciale
Esercizio: Prodotto Matriciale
Nel file di funzione es_mprod.m, si definisca la funzione:
Si definisca una funzione:
- Che calcoli il prodotto matriciale di
AeB
Si verifichi la correttezza:
- Nella funzione principale
- Utilizzando matrici di numeri casuali (attenzione alle dimensioni!)
- Confrontandosi con l’operatore di prodotto in Matlab
Suggerimento: ogni prodotto riga/colonna è un prodotto scalare!
Esercizio: Scorrimento Circolare
Esercizio: Scorrimento Circolare
Nel file di funzione es_shift.m, definite la funzione:
- Deve restituire un vettore
W, identico aV… - …Ma con gli elementi spostati a sx di una posizione…
- …E in modo circolare: il primo elemento diventa l’ultimo
Per esempio:
Esercizio: Scorrimento Circolare
Verificate la correttezza:
- Utilizzate vettori casuali o inseriti a mano
- Controllate il risultato visivamente
Suggerimento:
- Si può implementare la funzione scambiando gli elementi consecutivi
- …Ossia scambiando
W(ii)conW(ii+1)in sequenza