Equazioni Differenziali e Sistemi Dinamici
ODE e Sistemi Dinamici
Una equazione differenziale ordinaria (ODE) è definita da:
\[\dot{x} = f(t, x)\]
- Dove \(t\) è una variabile scalare
- \(x\) è una funzione di \(t\), potenzialmente con valori vettoriali, i.e.:
\[x : \mathbb{R} \mapsto \mathbb{R}^n\]
- \(\dot{x}\) è la derivata di \(x\) in \(t\)
Informalmente, una eq. diff. ord. definisce un sistema dinamico
- \(x\) è lo stato del sistema, che evolve nel tempo \(t\)
- \(f\) specifica come la derivata di \(x\) dipenda dallo stato e dal tempo
- Il tempo è una variabile continua \(\Rightarrow\) il sistema è tempo-continuo
Riduzione al Primo Ordine
È sufficiente limitarsi alla derivata del primo ordine
- Se ci sono derivate di ordine maggiore, e.g. \(\ddot{x}\)…
- …Possono essere sempre ricondotte al primo ordine…
- …Introducendo un elemento di stato per ogni derivata intermedia
Per esempio:
\[\ddot{x} = a t^2\]
Introducendo \(y = \dot{x}\), diventa:
\[\left(\begin{array}{c}
\dot{x} \\
\dot{y}
\end{array}\right) =
\left(\begin{array}{c}
y \\
a t^2
\end{array}\right)\]
- Caso tipico: \(x =\) posizione, \(y =\) velocità
Problemi ai Valori Iniziali
Quando si risolve una ODE, l’obiettivo è determinare \(x\)
Ma \(x\) è una funzione! Quindi vogliamo determinarne l’andamento
- Per farlo, è necessario fare alcune assunzioni addizionali…
- …Per esempio, possiamo specificare un valore iniziale
In questo modo otteniamo un problema ai valori inziali:
\[\begin{align}
& \dot{x} = f(t, x) \\
& x(0) = x_0
\end{align}\]
Intuitivamente, si tratta di simulare il sistema dinamico
- Poiché il sistema è tempo-continuo, \(f\) non determina lo stato futuro…
- …Ma il modo in cui lo stato varia (i.e. la sua derivata)
ODE in Matlab
Matlab mette a disposizione diversi risolutori di ODE
Quello che utilizzeremo principalmente è accessibile mediante:
Per quanto riguarda i parametri di ingresso/uscita:
f è la funzione che definisce la ODE. La sua interfaccia deve essere:
t è il “tempo”x è lo stato corrente (un vettore)dx è la derivata dello stato corrente (un vettore colonna)
ODE in Matlab
Matlab mette a disposizione diversi risolutori di ODE
Quello che utilizzeremo principalmente è accessibile mediante:
Per quanto riguarda i parametri di ingresso/uscita:
tspan è un vettore con i due estremi dell’intervallo di simulazione
x0 è lo stato inizialeT contiene tutti gli istanti di tempo visitati dall’algoritmo- Ogni riga della matrice
X contiene uno stato visitato
- Esattamente come per la nostra vecchia
simulate
Esempio: L’Auguste Piccard PX-8
Esempio: L’Auguste Piccard PX-8
L’attrattiva principale dell’Expo 1964 fu un sottomarino
![]()
- Faceva immersioni con passeggeri nel Lago di Ginevra
Esempio: L’Auguste Piccard PX-8
Per muoversi in verticale un sottomarino carica/scarica acqua
In questo modo esso varia la sua densità
- Se la densità è maggiore di \(\rho\), il sottomarino “cade” nel fluido
- Se è minore, il sottomarino “cade” verso l’alto
- Se è uguale, il sottomarino si muove per inerzia
Per precisione, il sottomarino è soggetto a tre forze principali:
- La forza di gravità, che lo accelera verso il basso
- La forza di galleggiamento, che lo accelera verso l’alto
- L’attrito aerodinamico dell’acqua (trascinamento)
Esempio: L’Auguste Piccard PX-8
Sia \(L\) il volume dell’acqua a bordo, allora abbiamo che:
La forza di gravità è data da (asse cartesiano orientato verso l’alto):
\[F_g = -g (m + \rho L)\]
- \(m\) è la massa del sottomarino
- \(g\) è l’accelerazione di gravità
- \(\rho\) è la densità dell’acqua
La forza di galleggiamento è data da (principio di Archimede):
\[F_b = g \rho V\]
- \(V\) è il volume del sottomarino
Esempio: L’Auguste Piccard PX-8
Sia \(L\) il volume dell’acqua a bordo, allora abbiamo che:
- L’attrito aerodinamico dell’acqua (trascinamento) è dato da:
\[F_t = -\frac{1}{2} \rho A C_D\, v |v|\]
- \(A\) è l’area della sezione
- \(C_D\) è un coefficiente che dipende dalla forma
- \(v\) è la velocità
- Il prodotto \(v |v|\) ha lo stesso segno di \(v\)…
- …ed il valore assoluto di \(v^2\)
Esempio: L’Auguste Piccard PX-8
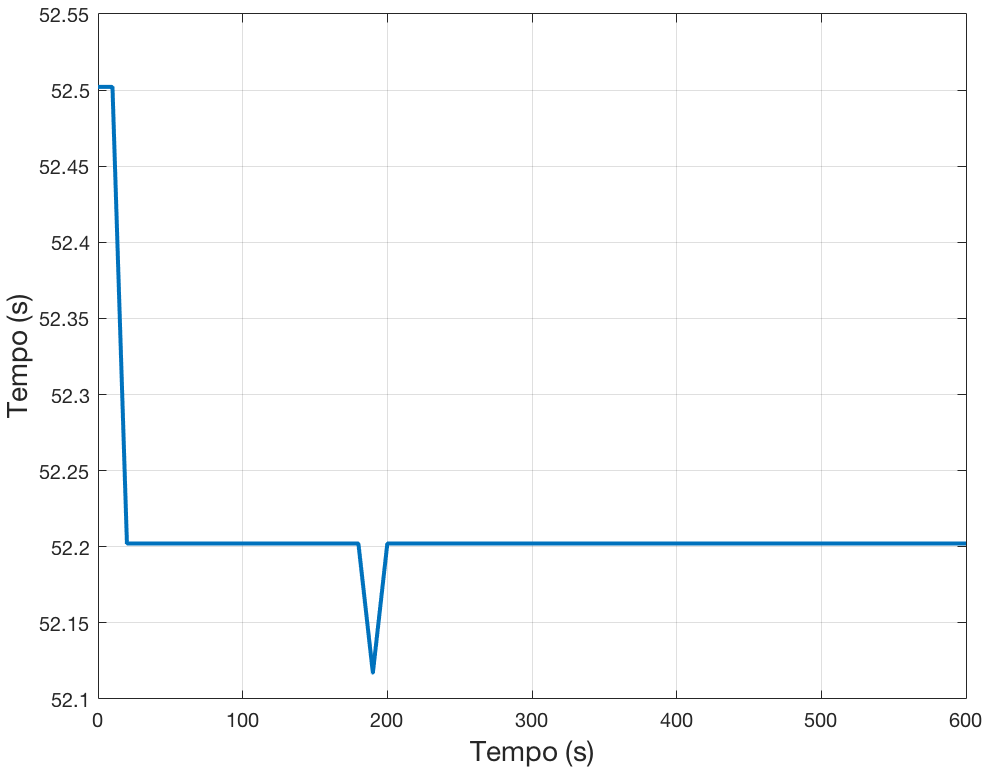
Supponiamo che l’acqua a bordo vari nel modo seguente:
![]()
- Il valore \(L \simeq 52.2\) bilancia le forze di gravità e galleggiamento
Esempio: L’Auguste Piccard PX-8
In pratica, \(L\) varia secondo una funzione lineare a tratti
- In Matlab la si può valutare con
interp1
- I punti
Tp e Lp che definiscono la funzione sono in es_submarine.m
- Il file contiene anche tutte le informazioni sul PX-8
Si desidera calcolare la quota del PX-8 nel tempo
- Questa è regolata dall’equazione differenziale:
\[\ddot{x} = \frac{1}{m + \rho L} (F_g + F_b + F_t)\]
- La quota iniziale \(x_0\) è \(-5\, m\)
- In particolare, quale è la quota dopo 10, 20 e 30 minuti?
Esempio: L’Auguste Piccard PX-8
Dobbiamo risolvere un problema ai valori iniziali
Per farlo, dovremo invocare:
function [T, X] = ode45(f, tspan, x0)
Quindi dobbiamo determinare:
- Come descrivere lo stato \(X\) del sistema
- Una buona scelta: \(X = (\text{posizione}, \text{velocità})\)
- L’intervallo di simulazione
- Una buona scelta: \([0, 1800]\) (30 minuti)
- La funzione
f che ne calcola la derivata
Esempio: L’Auguste Piccard PX-8
Per definire f è utile procedere nel solito modo:
- Prima definiamo una funzione che calcoli la derivata dello stato…
- …A partire da tutti i dati del problema
function dx = dstate(t,x,g,V,M,rhoW,Cd,S,Tp,Lp)
% x(1) = altitudine, x(2) = velocita'
Fb = g * rhoW * V; % Galleggiamento
L = interp1(Tp, Lp, t); % Carico d'acqua
Fg = -(g*M + g*rhoW * L); % Gravità
Ft = -0.5 * x(2) * abs(x(2)) * Cd * S * rhoW;
% Calcolo le derivate
dx(1) = x(2);
dx(2) = (Fb+Fg+Ft) / (M + rhoW * L);
end
Esempio: L’Auguste Piccard PX-8
Per definire f è utile procedere nel solito modo:
- Quindi definiamo una funzione anonima…
- …Che esponga solo due parametri (i.e. \(t\) ed \(X\))
La funzione anonima potrà essere utilizzata per invocare ode45
dX = @(t, x) dstate(t,x,g,V,M,rhoW,Cd,S,Tp,Lp)';
x0 = [-5, 0]; % Stato iniziale
tspan = [0, 1800];
[t, X] = ode45(dX, tspan, x0);
- Notate che
dX deve restituire un vettore colonna…
- …Per questa ragione trasponiamo il risultato di
dstate
- Ricordate che la quota iniziale è \(-5\, m\)
Esempio: L’Auguste Piccard PX-8
A questo punto possiamo recuperare quota e velocità
Possiamo disegnare l’andamento della quota:
Esempio: L’Auguste Piccard PX-8
A questo punto possiamo recuperare quota e velocità
Ed ottenere la quota dopo 10, 20, 30 minuti:
- Usiamo
interp1 perché la “funzione quota” x è definita per punti
Esercizio: Riscaldamento di una Stanza (2)
Esercizio: Riscaldamento di una Stanza (2)
Vogliamo riscaldare una stanza con un convettore
- Il convettore riscalda l’aria, che sua volta riscalda i muri
- …Che disperdono parte del calore verso l’esterno
- La temperature del convettore e dell’esterno sono costanti
- L’aria della stanza ed i muri hanno capacità termiche non trascurabili
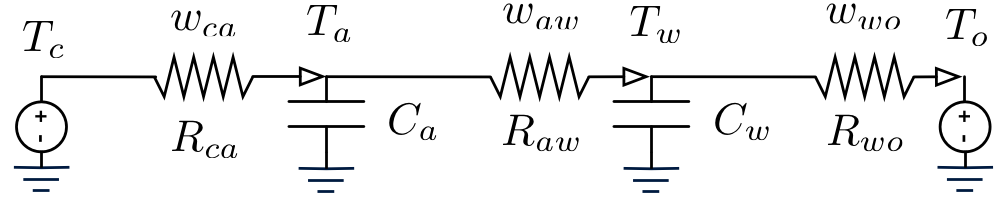
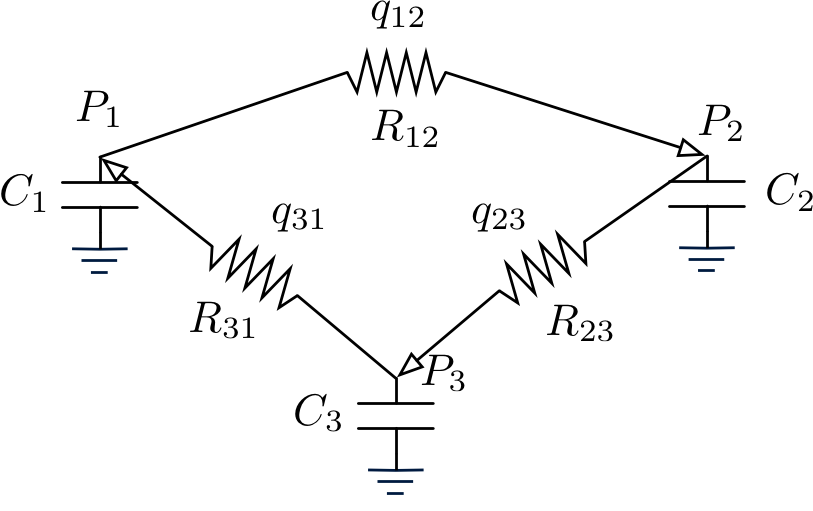
Possiamo modellare il sistema utilizzando un circuito RC equivalente:
![]()
- Cerchi = generatori di tensione (temperature)
- Zig-zag = resistenze (resistenze termiche)
- Linee parallele = capacitori (capacità termiche)
Esercizio: Riscaldamento di una Stanza (2)
Vogliamo ottenere un modello tempo-continuo
![]()
Ogni capacità si può modellare con una equazione differenziale:
\[\begin{align}
& \dot{T}_a = \frac{1}{C_a} (w_{ca} - w_{aw}) && \dot{T}_w = \frac{1}{C_w} (w_{aw} - w_{wo})
\end{align}\]
Esercizio: Riscaldamento di una Stanza (2)
Vogliamo ottenere un modello tempo-continuo
![]()
I flussi invece si calcolano mediante equazioni lineari:
\[\begin{align}
& w_{ca} = \frac{1}{R_{ca}} (T_c - T_a) \\
& w_{aw} = \frac{1}{R_{aw}} (T_a - T_w) \\
& w_{wo} = \frac{1}{R_{wo}} (T_w - T_o) \\
\end{align}\]
Esercizio: Riscaldamento di una Stanza (2)
Quindi nel complesso abbiamo le equazioni differenziali:
\[\begin{align}
& \dot{T}_a = \frac{1}{C_a} (w_{ca} - w_{aw}) && \dot{T}_w = \frac{1}{C_w} (w_{aw} - w_{wo}) \\
\end{align}\]
Dove:
\[\begin{align}
& w_{ca} = \frac{1}{R_{ca}} (T_c - T_a) \\
& w_{aw} = \frac{1}{R_{aw}} (T_a - T_w) \\
& w_{wo} = \frac{1}{R_{wo}} (T_w - T_o) \\
\end{align}\]
Esercizio: Riscaldamento di una Stanza (2)
Tutti dati del problema sono disponibile ne file es_heating2.m
- Assumendo che i valori iniziali di \(T_a\) e \(T_w\) siano noti…
- …vogliamo determinare l’andamento delle temperature per 2 ore
- Si disegni su un unico grafico l’andamento di \(T_a\) e \(T_w\)
- Si determini la temperatura finale dell’aria e dei muri
- Si determini la temperature dell’aria e dei muri dopo un’ora
- Si determini il tempo necessario perché l’aria raggiunga i 20°C
Esercizio: Dalla Terra alla Luna
Esercizio: Dalla Terra alla Luna
Nel libro di Jule Verne “Dalle Terra alla Luna”…
![]()
- …Il veicolo con i protagonisti viene “sparato” verso la Luna
Esercizio: Dalla Terra alla Luna
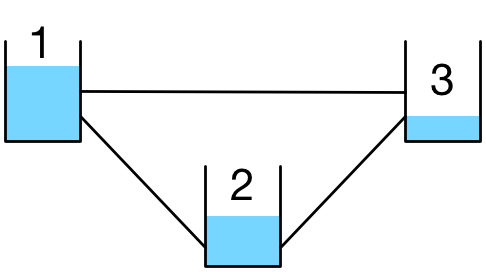
Durante il viaggio, la navicella è soggetta a forze gravitazionali
Esse sono regolate dalla legge di gravitazione di Newton:
\[F_{12} = -G \frac{m_1 m_2}{r_{12} \|r_{12}\|}\]
- \(F_{12}\) è la forza esercitata dal corpo 2 sul corpo 1
- \(G\) è la costante di gravitazione
- \(m_1\) ed \(m_2\) sono le masse del corpo 1 e 2
- \(r_{12}\) è la distanza dal corpo 1 al corpo 2, i.e. \[r_{12} = x_1 - x_2\]
- \(x_1\) e \(x_2\) sono le posizioni di 1 e 2
- Funziona per scalari (la forma vettoriale è leggermente diversa)
Esercizio: Dalla Terra alla Luna
Si desidera modellare il moto della navicella
- Assumiamo per semplicità che la Terra e la Luna siano in fisse
- Quindi la nave viaggerà lungo una traiettoria verticale
- Il moto sarà regolato dell’equazione differenziale:
\[\ddot{x} = \frac{1}{m_s} (F_{se} + F_{sm})\]
- \(m_s\) è la massa della navicella
- \(F_{se}\) è l’attrazione esercitata dalla Terra sulla navicella
- \(F_{sm}\) è l’attrazione esercitata dalla Luna sulla navicella
Esercizio: Dalla Terra alla Luna
Inoltre, assumiamo che:
- Il centro della Terra abbia quota 0
- La navicella parta da una quota \(r_E\) (i.e. il raggio della Terra)
La navicella deve così raggiungere la quota \(D-r_M\)
- Con \(D =\) distanza Terra-Luna e \(r_M =\) raggio lunare
I dati del problema sono nel file es_moonshot.m
- Si disegni l’andamento della quota della navicella
- Come velocità iniziale, si usino sia \(11,000\, m/s\) che \(11,100\, m/s\)
- Si verificano problemi di calcolo? Perché?
- Si determini la quota massima raggiunta: è superiore a \(D-r_M\)?