Elementi di Informatica e
Applicazioni Numeriche T
Un Esempio di Sistema Dinamico
Un Esempio (Moderatamente) Realistico
Consideriamo un ipotetico impianto di produzione di biodiesel:

Sommariamente, l'impianto funziona:
- Immettendo nutrienti ("cibo", C)...
- ...questi sono consumati da batteri (B)...
- ...che producono biodiesel (D)
In dettaglio le cose sono un po' più complesse...
Un Esempio (Moderatamente) Realistico
Nel dettaglio nell'impianto avvengono i seguenti processi:
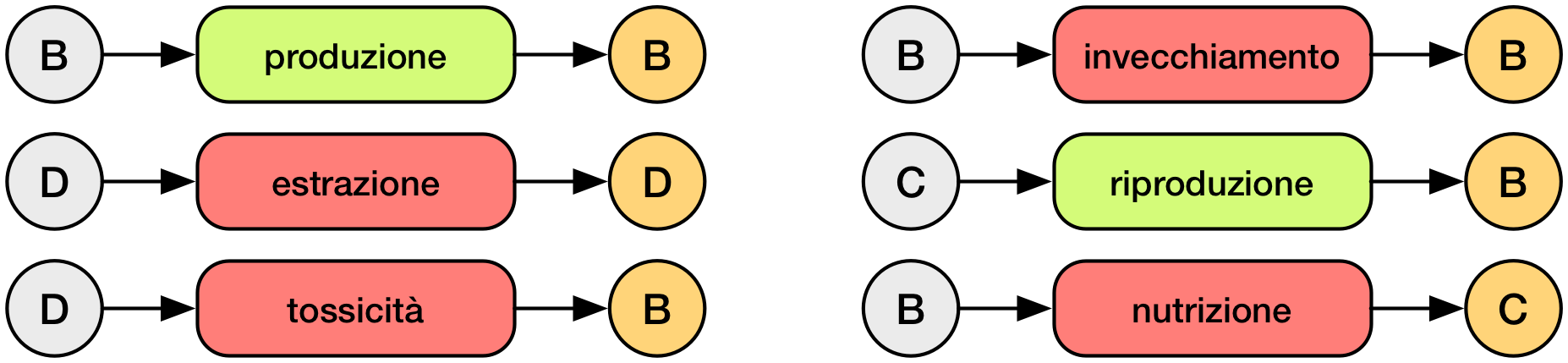
Ogni processo mette in relazione:
- La quantità dell'entità a sx (e.g. "D" per "tossicità")
- Con la quantità dell'entità a dx (e.g. "B" per "tossicità")
Verde: effetto positivo - Rosso: effetto negativo
Un Esempio (Moderatamente) Realistico
Nel dettaglio nell'impianto avvengono i seguenti processi:

In particolare, per ogni processo conosciamo:
- L'effetto sulla quantità dell'entità di dx...
- ...Misurato rispetto alla quantità dell'entità di sx
Un Esempio (Moderatamente) Realistico
Nel dettaglio nell'impianto avvengono i seguenti processi:
Il nostro problema:
- Se immettiamo costantemente nel sistema una unità di cibo...
- ...quante unità di biodiesel vengono prodotte a regime?
Come lo affrontiamo? Ci serve un modello matematico
Un Esempio (Moderatamente) Realistico
Questo è un esempio di un Sistema Dinamico:
- I "processi" descrivono l'evoluzione del sistema nel tempo
- Per ottenere un modello va deciso come trattare il tempo
Caso A: Consideriamo il tempo come una variabile continua
- Il modello consisterà di equazioni differenziali
Caso B: Consideriamo intervalli di tempo discreti
- Il modello consisterà di equazioni alle differenze
Questa volta vediamo solo il secondo caso
Un Esempio (Moderatamente) Realistico
Proviamo a tradurre i processi in equazioni
Usiamo k per l'istante corrente e k+1 per il prossimo istante:
D(k+1)=(1−estr.)D(k)+(prod.)B(k)B(k+1)=(−toss.)D(k)+(1−inve.)B(k)+(ripr.)F(k)C(k+1)=(−nutr.)B(k)+1C(k)+cibo introdotto
Un Esempio (Moderatamente) Realistico
Proviamo a tradurre i processi in equazioni
Introducendo i valori noti otteniamo:
D(k+1)=(1−1)D(k)+1B(k)B(k+1)=−0.5D(k)+(1−0.2)B(k)+0.3F(k)C(k+1)=−1B(k)+1C(k)+1
Un Esempio (Moderatamente) Realistico
Proviamo a tradurre i processi in equazioni
Alla fine otteniamo le seguenti equazioni alle differenze:
D(k+1)=B(k)B(k+1)=−0.5D(k)+0.8B(k)+0.3F(k)C(k+1)=−1B(k)+1C(k)+1
Un Esempio (Moderatamente) Realistico
Proviamo a tradurre i processi in equazioni
Le equazioni sono lineari, quindi il nostro sistema dinamico è lineare
D(k+1)=B(k)B(k+1)=−0.5D(k)+0.8B(k)+0.3F(k)C(k+1)=−1B(k)+1C(k)+1
Un Esempio (Moderatamente) Realistico
Proviamo a tradurre i processi in equazioni
Visto che il sistema è lineare, possiamo usare la forma matriciale:
(D(k+1)B(k+1)C(k+1))=(010−0.50.80.30−11)(D(k)B(k)C(k))+(001)
Elementi di Informatica e
Applicazioni Numeriche T
Stato Stazionario e Sistemi Lineari
Sistemi Dinamici Lienari
Generalizzando un po', il nostro sistema si presenta così:
x(k+1)=Ax(k)+b
- Dove la matrice
Aè (sempre) quadrata - Formalmente:
A:V→V
Aci dice quale sarà il prossimo stato del sistema- Per questo si chiama anche matrice di transizione (di stato)
Stato Stazionario di un Sistema Dinamico
- A noi interessa quanto biodiesel viene prodotto a regime...
- ...Ossia quando il comportamento del sistema di stabilizza
Questa condizione si chiama stato stazionario del sistema
Come possiamo individuare lo stato stazionario?
- Nello stato stazionario
xnon cambia, ossia:
x(k+1)=x(k)
- Quindi possiamo riferci sia a
xkchexk+1semplicemente conx:
x=Ax+b
Stato Stazionario di un Sistema Dinamico
- A noi interessa quanto biodiesel viene prodotto a regime...
- ...Ossia quando il comportamento del sistema di stabilizza
Questa condizione si chiama stato stazionario del sistema
Come possiamo individuare lo stato stazionario?
- Con qualche trasformazione otteniamo:
x−Ax=b
- E in forma matriciale:
(I−A)x=b
Stato Stazionario e Sistemi di Equazioni Lineari
Abbiamo ottenuto un normale sistema di equazioni lineari!
(I−A)x=b
La soluzione è data da:
x=(I−A)−1b
- Si può risolvere per esempio usando la riduzione di Gauss
- Oppure invertendo la matrice (brutta idea: vedremo perché)
Se A è non singolare, lo stato stazionario è unico
- Perché ci sono tanti vincoli quante variabili
- Noi assumeremo sempre che
Asia non singolare
Sistemi di Equazioni Lineari in Octave
Risolvere sistemi di equazioni lineari in Octave è facile
Si può usare l'operatore di divisione a sinistra "\"
X \ Y
Xè una matrice che dovrebbe essere invertibile (non singolare)Yè un vettore o una matrice- e
X \ Ysta perX−1Y
Il risultato viene calcolato senza invertire la matrice X
Esiste anche un operatore di "divisione a destra":
X / Ysta perXY−1
Sistemi di Equazioni Lineari in Octave
Nel nostro caso abbiamo:
x∗=(I−A)−1b
Dove x∗ è lo stato stazionario. Si può risolvere con:
n = rows(A);
x = (eye(n) - A) \ b
eye(n)restituisce la matrice identitàn×n
Con la nostra matrice A e vettore b il risultato è:
x∗=(D∗,B∗,C∗)=(1,1,2.334)
- Quindi a regime viene prodotta una unità di biodiesel
Elementi di Informatica e
Applicazioni Numeriche T
Iterazione di Punto Fisso
Un Metodo di Soluzione Alternativo
Vediamo un metodo alternativo per trovare lo stato stazionario
Consideriamo il sistema dinamico lineare:
x(k+1)=Ax(k)+b
Possiamo lasciare evolvere il sistema finché non ci arriva da solo

Iterazione di Punto Fisso
L'algoritmo si chiama Iterazione di Punto Fisso
È molto facile da codificare:
x = rand(n, 1); % n = num. variabili
x_old = -Inf
while x ~= x_old
x_old = x;
x = A * x + b;
end
Il confronto x ~= x_old è molto "pericoloso" perché:
- Lo stato stazionario può essere raggiunto asintoticamente
- Se succede
xex_oldnon saranno mai uguali!
Iterazione di Punto Fisso
L'algoritmo si chiama Iterazione di Punto Fisso
È molto facile da codificare:
x = rand(n, 1); % n = num. variabili
x_old = -Inf
while x ~= x_old
x_old = x;
x = A * x + b;
end
Il confronto x ~= x_old è molto "pericoloso" perché:
xex_oldsono rappresentati con un numero finito di bit- I calcoli sono inevitabilmente approssimati!
Iterazione di Punto Fisso
L'algoritmo si chiama Iterazione di Punto Fisso
È molto facile da codificare:
x = rand(n, 1); % n = num. variabili
x_old = -Inf
while abs(x - x_old) > 10e-6 % era: x ~= x_old
x_old = x;
x = A * x + b;
end
Soluzione: usare |x(k+1)−x(k)|>ε
- Per
εsi usa un valore di tolleranza arbitrario - Nel codice è stato scelto
10−6
Iterazione di Punto Fisso: Osservazioni
A proposito dell'approssimazione:
- L'algoritmo otterrà in genere delle soluzioni approssimate
- Ma anche il sistema di equazioni lineari!
I numeri sono sempre rappresentati con un numero finito di bit
- Quindi una certa approssimazione è inevitabile!
- ...Perlomeno quando lavoriamo con numeri in virgola mobile
È una osservazione importante e generale
- Una conseguenza: fidatevi poco dei confronti di tipo
x == y - Meglio usare
abs(x-y) < tolleranza
Iterazione di Punto Fisso: Osservazioni
Perchè si chiama "Iterazione di Punto Fisso"
Consideriamo la descrizione del nostro stato stazionario:
x=Ax+b
xviene mappato daAx+bin sé stesso- Si dice che
xè un punto fisso diAx+b
Possiamo vedere la cosa da due punti di vista:
- Lo stato stazionario del sistema dinamico x(k+1)=Ax(k)+b
- Oppure il punto fisso di Ax+b
Iterazione di Punto Fisso: Osservazioni
Tale equivalenza è molto importante
Se abbiamo un sistema di equazioni lineari nella forma:
x=Ax+b
- Possiamo vederlo come un sistema dinamico:
x(k+1)=Ax(k)+b
- Ed applicare l'IPF per risolverlo
L'avevamo già detto, ma vale la pena di ripeterlo
Elementi di Informatica e
Applicazioni Numeriche T
Convergenza e Divergenza
Prestazioni dell'IPF
Come si comporta l'Iterazione di Punto Fisso nel nostro caso?
Ricapitoliamo un po' la situazione:
A=(010−0.50.80.30−11)b=(001)
Il punto fisso/stato stazionario è dato da:
x∗=(I−A)−1b=(1,1,2.334)T
Quanto velocemente ci arriva IPF?
Prestazioni dell'IPF
100 iterazioni di IPF (blu = partenza, rosso = punto fisso)

Prestazioni dell'IPF
- Non siamo andati malaccio!
- In qualche decina di iterazioni siamo arrivati al punto fisso...
- Ossia, l'algoritmo è arrivato a convergenza
Non va sempre così bene, però...
A volte ci vogliono molte iterazioni per convergere
- Si dice anche che la convergenza è "lenta"
- Ovviamente, se il vettore è vicino al punto iniziale...
- ...ci vorranno meno iterazioni per convergere
Può essere anche che IPF non converga affatto...
Convergenza e Divergenza
Consideriamo una piccola variazione del nostro sistema:
Portiamo la mortalità per invecchiamento al 5% (invece che 20%):
A=(010−0.50.950.30−11)b=(001)
Il punto fisso/stato stazionario è dato da:
x∗=(I−A)−1b=(1,1,1.834)T
Vediamo come si comporta IPF in questo caso...
Convergenza e Divergenza
L'IPF si allontana dal punto fisso, cioè diverge

Convergenza e Divergenza
Vediamo un'altra variazione:
Portiamo la mortalità per invecchiamento al 10% (invece che 20%):
A=(010−0.50.90.30−11)b=(001)
Il punto fisso/stato stazionario è dato da:
x∗=(I−A)−1b=(1,1,2)T
Vediamo come si comporta l'IPF in questo caso...
Convergenza e Divergenza
L'IPF assume un comportamento periodico

Convergenza, Divergenza ed Equilibri
Ci sono tre comportamenti possibili:
Sono interpretabili in termini di:
- Punto fisso di una trasformazione lineare Ax+b
- Stato di un sistema dinamico
Caso 1: L'IPF converge
- In questo caso troviamo il punto fisso
- Lo stato stazionario rappresenta un equilibrio stabile
Di solito è il comportamento più desiderabile
Convergenza, Divergenza ed Equilibri
Caso 2: L'IPF diverge
- In questo caso non troviamo il punto fisso di
Ax+b - Lo stato stazionario rappresenta un equilibrio instabile
- Una perturbazione dell'equilibrio causa grandi variazioni
Di solito è il caso meno desiderabile
Caso 3: L'IPF assume un comportamento periodico
- In questo caso non troviamo il punto fisso di
Ax+b - Lo stato stazionario rappresenta un equilibrio instabile
- Una perturbazione dell'equilibrio causa oscillazioni finite
Gestire Casi di Non Convergenza
Possiamo modificare il codice per gestire casi non convergenti
Il nostro codice attuale:
x = rand(n, 1); % n = num. variabili
x_old = -Inf
while abs(x - x_old) > 10e-6
x_old = x;
x = A * x + b;
end
Gestire Casi di Non Convergenza
Possiamo modificare il codice per gestire casi non convergenti
Spostiamo il controllo di convergenza:
x = rand(n, 1); % n = num. variabili
x_old = -Inf
while % ???
x_old = x;
x = A * x + b;
if abs(x - x_old) < 10e-6
break
end
end
Gestire Casi di Non Convergenza
Possiamo modificare il codice per gestire casi non convergenti
Usiamo un ciclo for per limitare le iterazioni
x = rand(n, 1); % n = num. variabili
x_old = -Inf
for k = 1:10000
x_old = x;
x = A * x + b;
if abs(x - x_old) < 10e-6
break
end
end
Gestire Casi di Non Convergenza
Possiamo modificare il codice per gestire casi non convergenti
È buona norma usare delle variabili per aumentare la leggibilità
x = rand(n, 1); % n = num. variabili
x_old = -Inf
n = 10000; % limite di iterazione
tol = 10e-6; % tolleranza
for k = 1:n
x_old = x;
x = A * x + b;
if abs(x - x_old) <= tol
break
end
end
Convergenza ed Errore
È possibile caratterizzare le condizioni di convergenza?
- Sì, ma bisogna arrivarci per gradi...
- ...come primo passo, è utile introdurre il concetto di errore
L'errore commesso dell'IPF ad una data iterazione è:
e=(x−x∗)
- Dove
x∗è il punto fisso
A cosa ci serve questa definizione?
- Proviamo a descrivere il nostro sistema in termini di errore...
Convergenza ed Errore
Il sistema è definito da:
x=Ax+b
- Con qualche manipolazione otteniamo:
x−x∗=A(x−x∗+x∗)+b−x∗
- Tenendo conto che
e=x−x∗otteniamo:
e=Ae+Ax∗+b−x∗
- Ma
x∗è un punto fisso, quindiAx∗+b=x∗, quindi:
e=Ae
Dimostrazione di Convergenza
Come cambia l'errore nel tempo?
- Basta vedere il punto fisso come stato stazionario:
e(k+1)=Ae(k)
- Perché vi sia convergenza l'errore deve decrescere:
lim
- Noi sappiamo che
e^{(k+1)} = A e^{(k)}e quindi:
\lim_{k \rightarrow \infty} \frac{\left| A e^{(k)} \right|}{\left| e^{(k)} \right|} < 1
Dimostrazione di Convergenza
Per semplicità:
- Consideriamo solo il caso in cui
Asia diagonalizzabile - Quindi, esiste una matrice di cambiamento di base
Ptale che:
A = P^{-1} \Lambda P
- Dove
\Lambdaè una matrice diagonale... - ...e gli elementi sulla diagonale sono gli autovalori
\lambda_i
Quindi possiamo scrivere:
\lim_{k \rightarrow \infty} \frac{\left| P^{-1}\Lambda P e^{(k)} \right|}{\left| e^{(k)} \right|} < 1
Dimostrazione di Convergenza
Tutto dipende dal valore di \left|P^{-1}\Lambda P e^{(k)}\right| e \left|e^{(k)}\right|
- Poiché
Pè una matrice di cambiamento di base... - I vettori
PveP^{-1}vhanno lo stesso valore assoluto div
Quindi il termine:
\left|P^{-1}\Lambda P e^{(k)}\right|
- Ha un valore assoluto più piccolo di
\left|e^{k}\right|se e solo se... - ...tutti gli elementi di
\Lambdahanno un valore assoluto< 1
Quindi se per tutti gli autovalori \lambda_i di A vale |\lambda_i| < 1
Convergenza ed Autovalori
In Octave, basta controllare che siano < 1 tutti gli elementi di:
abs(eig(A))
eig(A)restituisce gli autovalori diA
Cosa succede se c'è un autovalore con |\lambda_i| \geq 1?
Se |\lambda_i| > 1, allora:
- IPF diverge/lo stato stazionario è instabile
Se |\lambda_i| = 1, allora:
- IPF/il sistema dinamico hanno comportamento periodico
Qualche Dritta
Se siete interessati ad un caso specifico, e.g.:
- Trovare lo stato stazionario di un particolare sistema
- Risolvere uno specifico sistema di equazioni
Potete anche non stare a calcolare gli autovalori
- Eseguite IPF e vedete se funziona
- Basta tenere traccia dei valori di x^{(k)}...
- ...e si deduce da quelli se ci sia convergenza o no
Elementi di Informatica e
Applicazioni Numeriche T
IPF ed Equazioni Non Lineari
Partiamo da un Problema
Supponiamo di dover risolvere una equazione non lineare
Per esempio (un ipotetico bilancio di energia):
\log (x+1) = x^2-1
Partiamo da un Problema
Supponiamo di dover risolvere una equazione non lineare

Si tratta di trovare un punto in cui le due curve si intersecano
Partiamo da un Problema
Supponiamo di dover risolvere una equazione non lineare
Per esempio (un ipotetico bilancio di energia):
\log (x+1) = x^2-1
- Non esiste una soluzione generale in forma chiusa
- Che possiamo fare?
Partiamo da un Problema
Supponiamo di dover risolvere una equazione non lineare
Per esempio (un ipotetico bilancio di energia):
\log (x+1) = x^2-1
- Non esiste una soluzione generale in forma chiusa
- Che possiamo fare?
Proviamo a manipolarla un po':
\begin{align}
x+1 &= e^{x^2-1}\\
x &= e^{x^2-1} - 1
\end{align}
E qui ci fermiamo. Perché?
IPF ed Equazioni Non Lineari
Possiamo vedere l'equazione come un sistema dinamico...
x^{(k+1)} = e^{(x^{(k)})^2-1} - 1
...e tentare di risolverlo con l'Iterazione di Punto Fisso
- Se il metodo converge, otteniamo una soluzione approssimata
- Se non converge, non abbiamo nulla
Ricordiamo però che:
- Per le equazioni non lineari generiche...
- ...una soluzione in forma chiusa non esiste
Una soluzione in alcuni casi è sempre meglio che niente!
IPF ed Equazioni Non Lineari
Possiamo vedere l'equazione come un sistema dinamico...
x^{(k+1)} = e^{(x^{(k)})^2-1} - 1
...e tentare di risolverlo con l'Iterazione di Punto Fisso
L'approccio è applicabile ad equazioni generiche di tipo:
x = f(x)
...Purché il dominio ed il codominio coincidano: f : V \rightarrow V
- Caso 1:
xscalare edf(x)scalare - Caso 2:
xvettore edf(x)vettore (stessa dimensione)
IPF ed Equazioni Non Lineari
Il codice è praticamente invariato:
x = rand(n, 1); % n = num. variabili
x_old = -Inf
n = 10000;
tol = 10e-6;
for k = 1:n
x_old = x;
x = f(x); % <-- Era: A * x + b
if abs(x - x_old) <= tol
break
end
end
Un Esempio di Esecuzione
Visualizziamo l'esecuzione di IPF con funzioni ad un variabile:

Un Esempio di Esecuzione
Tracciamo y = f(x), y=x ed il punto di partenza x^{(0)} (in rosso)
Un Esempio di Esecuzione
Primo passo: calcoliamo f(x^{(0)})

Un Esempio di Esecuzione
Primo passo: f(x^{(0)}) diventa il valore di x^{(1)}

Un Esempio di Esecuzione
Secondo passo: calcoliamo f(x^{(1)})

Un Esempio di Esecuzione
Secondo passo: f(x^{(1)}) diventa il valore di x^{(2)}

Un Esempio di Esecuzione
Terzo passo: calcoliamo f(x^{(2)})

Un Esempio di Esecuzione
Procediamo fino a convergenza (o fino al limite di iterazioni)

Convergenza (Caso Non Lineare)
Se f(x) è non lineare, può esserci più di un punto fisso
In altre parole, più soluzioni per:
x = f(x)
Ogni punto fisso può rappresentare:
- Un equilibrio stabile
- Un equilibrio instabile
Nel secondo caso, il punto fisso è raggiunto solo se x^{(0)} = x^*
- Di fatto: la soluzione è praticamente irraggiungibile
Convergenza (Caso Non Lineare)
Se f(x) è non lineare, può esserci più di un punto fisso
In altre parole, più soluzioni per:
x = f(x)
Inoltre, a seconda della scelta di x^{(0)}
- IPF può convergere ad un punto fisso diverso
- Oppure IPF può divergere
Condizione di convergenza per un punto x^* (caso scalare):
- Il valore iniziale
x^{(0)}è vicino adx^* - La derivata
\left|f'(x)\right|è< 1in un intorno dix^*
Convergenza (Caso Non Lineare)
Proviamo ad abbozzare una dimostrazione:
- Per avere convergenza, deve valere
\lim_{k \rightarrow \infty} \frac{|e^{(k+1)}|}{|e^{(k)}|} < 1
- Quindi:
\lim_{k \rightarrow \infty} \frac{|x^{(k+1)} - x^*|}{|x^{(k)} - x^*|} < 1
Convergenza (Caso Non Lineare)
Proviamo ad abbozzare una dimostrazione:
- Quando eseguiamo IPF, abbiamo
x^{(k+1)} = f(x^{(k)}):
\lim_{k \rightarrow \infty} \frac{|f(x^{(k)}) - x^*|}{|x^{(k)} - x^*|} < 1
- Poiché
x^*è un punto fisso, abbiamox^* = f(x^*)
\lim_{k \rightarrow \infty} \frac{|f(x^{(k)}) - f(x^*)|}{|x^{(k)} - x^*|} < 1
In sostanza, la pendenza di f(x) nei punti visitati deve essere < 1
Convergenza (Caso Non Lineare)
Proviamo ad abbozzare una dimostrazione:
- In particolare, quando siamo molto vicini ad
x^*:
\frac{|f(x^{(k)}) - f(x^*)|}{|x^{(k)} - x^*|} \longrightarrow |f'(x)|
- Così arriviamo al nostro risultato...
Il modulo di f'(x) deve essere < 1 in un intorno di x^*
Punti Fissi Multipli: Esempio
Nel nostro caso:

Punti Fissi Multipli: Esempio
- Il punto fisso a sx è stabile (
|f'(x)| < 1in un intorno)
Punti Fissi Multipli: Esempio
- Il punto fisso a dx è instabile (non vale
|f'(x)| < 1in un intorno)
Punti Fissi Multipli: Esempio
- Se
x^{(0)}è troppo piccolo o troppo grande, si ha divergenza
Effetto di Manipolazioni Algebriche
Ci sono sempre molti modi per manipolare una equazione
Consideriamo il nostro esempio:
\log (x+1) = x^2-1
Aggiungendo x da entrambi i lati, possiamo ottenere:
x = - \log (x+1) + (x^2-1) + xx = + \log (x+1) - (x^2-1) + x
Invertendo x^2 - 1, possiamo ottenere invece:
x = \sqrt{\log (x+1) + 1}- Con l'assunzione che
\log (x+1) + 1 \geq 0
Effetto di Manipolazioni Algebriche
Manipolazioni diverse possono portare a proprietà diverse
Possiamo sfruttare questo fatto a nostro vantaggio
- Consideriamo la forma
x = \sqrt{\log (x+1) + 1} - Potrebbe sembrare scomoda, perché richiede
\log (x+1) + 1 \geq 0 - Però rende stabile il punto fisso di destra!
Effetto di Manipolazioni Algebriche
Stavolta abbiamo |f(x)| < 1 in un intorno del punto fisso dx

Effetto di Manipolazioni Algebriche
Manipolazioni diverse possono portare a proprietà diverse
Possiamo sfruttare questo fatto a nostro vantaggio
- Consideriamo la forma
x = \sqrt{\log (x+1) + 1} - Potrebbe sembrare scomoda, perché richiede
\log (x+1) + 1 \geq 0 - Però rende stabile il punto fisso di destra!
Una Dritta per un Caso Frequente
Supponiamo di avere una equazione nella forma:
f(x) = g(x)
Due modi per trasformala in forma utile ad IPF sono:
- Invertire
f(x), ottenendox = f^{-1}(g(x)) - Invertire
g(x), ottenendox = g^{-1}(f(x))
Quale scegliere? Un possibile metodo:
- Disegnare (anche a mano) un grafico stile-IPF...
- ...Utilizzando direttamente
y = f(x)ey = g(x)... - ...anziché
y = x(la bisettrice) ed un'altra funzione
Una Dritta per un Caso Frequente
Partiamo dalle due funzioni (blu = f(x), rosso = g(x))
Una Dritta per un Caso Frequente
Disegniamo un grafico stile-IPF, facendo sponda su g(x)

Una Dritta per un Caso Frequente
I movimenti verticali corrispondono a calcolare una funzione
Una Dritta per un Caso Frequente
I movimenti orizzontali corrispondono ad invertire una funzione
Una Dritta per un Caso Frequente
Così capiamo che invertendo f(x) convergiamo al punto fisso di sx
Una Dritta per un Caso Frequente
Mentre invertendo g(x) convergiamo al punto fisso di dx

Elementi di Informatica e
Applicazioni Numeriche T
Wrap-up
Wrap-up
Abbiamo visto un metodo di soluzione (IPF)
Può essere utilizzato per:
- Trovare lo stato stazionario di un sistema dinamico
- Trovare il punto fisso di una funzione
Partendo da una descrizione del sistema nella forma:
x = f(x)
- Ogni equazione può essere portata in questa forma...
- ...purché il dominio ed il codominio coincidano
Possiamo così risolvere numericamente equazioni anche non-lineari!
Wrap-up
L'Iterazione di Punto Fisso:
- Può convergere, divergere o assumere comportamento periodico
- Manipolando l'equazione si possono ottenere comportamenti diversi
- In generale, produce risultati approssimati
Conseguenze sulle condizioni di interruzione:
- Interrompiamo IPF dopo un certo numero di iterazioni...
- ...O se la differenza tra
x^{(k+1)}ex^{(k)}è sotto un certa tolleranza
Attenzione al valore della tolleranza!
- Una convergenza lenta può far interrompere IPF troppo presto