Elementi di Informatica e
Applicazioni Numeriche T
Esercizio 1 (modellazione)
Esercizio 1
Si progetti una pista da moto-cross con la forma data:
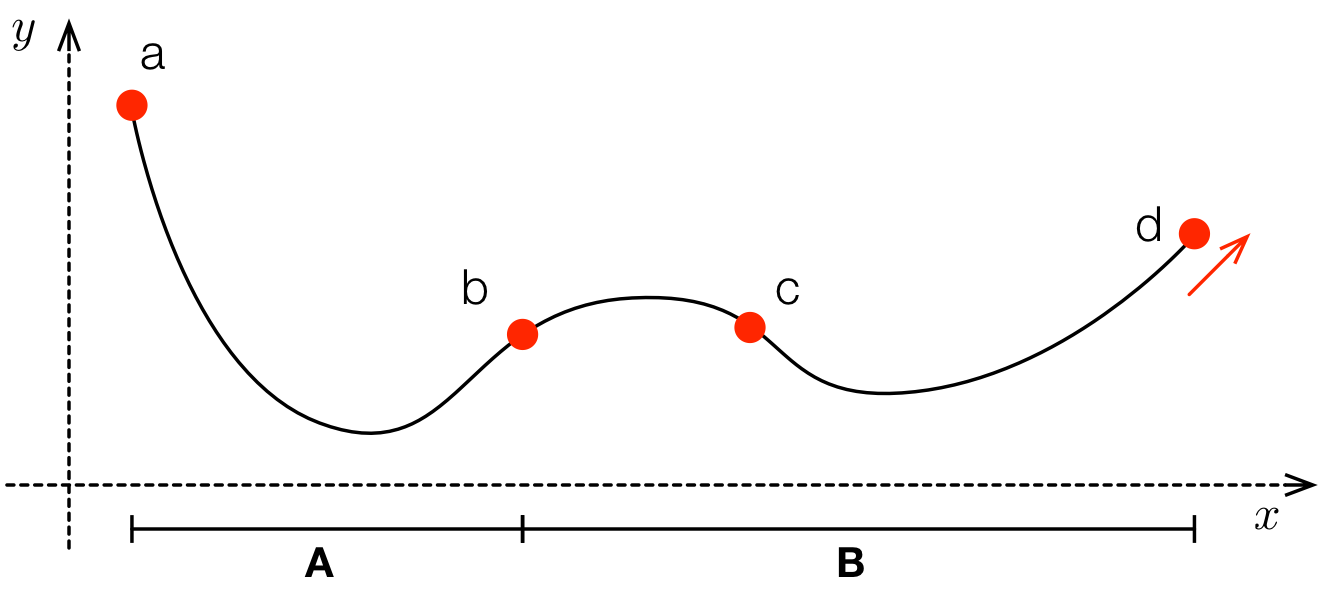
- Il tratto è descritto da due curve polinomiali, A e B
- La curva A deve passare per i punti
a,b - La curva B deve passare per i punti
b,c,d
Esercizio 1
Si progetti una pista da moto-cross con la forma data:
- I punti
a,b,c,dhanno coordinatex,ynote - La pendenza in
ddeve essere di 45° - La pendenza non deve avere discontinuità in
b
Esercizio 1
Si considerino i seguenti problemi:
- Q1: Come si possono ottenere le due equazioni del circuito?
- Q2: Come si può calcolare l'area sotto la curva?
- Essa potrebbe rappresentare (e.g.) la quanità di materiale...
- ...Necessaria per costruire la pista
- Si assuma che tutta la curva sia al di sopra dell'asse delle
x
- Q3: Come calcolare la quota minima raggiunta?
NOTA: questo esercizio è mediamente facile...
Soluzione (Q1)
- Si tratta di definire i parametri di due curve polnomiali
fβ(x),gβ(x) - Le due curve devono soddisfare le equazioni:
fβ(xa)=yafβ(xb)=ybf′β(xb)=g′β(xb)gβ(xb)=ybgβ(xc)=ycgβ(xd)=ydg′β(xd)=1
È un sistema con 7 equazioni, quindi ci vogliono 7 coefficienti
gβ(x)è coinvolta singolarmente in 4 equazioni, quinding=3- Di conseguenza abbiamo
nf=2
NOTA: una equazione coinvolge sia fβ(x) che gβ(x)
- Per questa ragione, ho un sistema unico anziché due sistemi
Soluzione (Q1)
Le due funzioni fβ(x),gβ(x) sono date da:
fβ(x)=β1x2+β2x1+β3f′β(x)=2β1x+β2gβ(x)=β4x3+β5x2+β6x+β7g′β(x)=3β4x2+2β5x+β6
- I parametri si possono trovare risolvendo il sistema precedente
- Il sistema è lineare in
β: si può utilizzare (e.g.) la riduzione di Gauss - In Octave, possiamo utilizzare la divisione sinistra
NOTA: di seguito, i parametri β verranno omessi nella notazione
Soluzione (Q2)
Per rispondere al quesito due è sufficiente integrare le due funzioni:
- Siano
QAeQBle aree sotto le curve A e B
QA=∫xbxaf(x)dxQB=∫xdxbg(x)dx
- L'area totale è data quindi da
Q=QA+QB
Soluzione (Q3)
Per rispondere a Q3, vanno confrontati i minimi delle due curve
La prima curva ha un unico punto stazionario:
- Esso rappresenta un minimo
- Lo si può individuare risolvendo:
f′(x)=2β1x+β2=0
- L'equazione si può risolvere anche per via analitica
- La soluzione è data da
x∗A=−12β2β1
Soluzione (Q3)
La seconda curva ha due punti stazionari
- Si possono individuare risolvendo:
g′(x)=3β4x2+2β5x+β6=0
Si può risolvere per via analitica o numerica
- Per esempio, possiamo usare il metodo della bisezione
- La forma della curva è approssimativamente nota...
- ...E possiamo notare che c'è un minimo tra
xcexd - Quindi possiamo usare
xc,xdcome estremi iniziali per il metodo
Elementi di Informatica e
Applicazioni Numeriche T
Esercizio 2 (modellazione)
Esercizio 2
La forza di attrito aerodinamico è data da:
F=12ρv2CDA
Dove:
ρè la densità del fluido in cui ci si muovevè la velocitàCDè un coefficiente di attritoAè l'area frontale
Esercizio 2
Sono stati fatti n esperimenti su un ciclista professionista:

- Per vari valori di velocità
viè stata misurata la forza di attritoFi
Esercizio 2
Durante una gara, sono state fatte m misurazioni ad intervalli di 5s

- Ogni misurazione comprende il valore della velocità
wk... - ...E la strada percorsa
xk
NOTA: quando la velocità è alta, ovviamente si fa più strada
Esercizio 2
Si considerino i seguenti problemi:
- Q1: Come stimare il valore del prodotto
CDAper il ciclista?- Si assuma che la densità dell'aria
ρsia nota
- Si assuma che la densità dell'aria
- Q2: Come calcolare il lavoro (fisico) svolto dal ciclista in gara?
- Si ricordi che il lavoro è data dal prodotto forza-spostamento...
- E che per avanzare bisogna bilanciare la forza di attrito
- Q3: Se si potesse ridurre del 10% il prodotto
CDA...- Come varierebbe il lavoro svolto dal ciclista in gara?
- Ipotesi: la forza del ciclista rimane invariata
- Ipotesi: la velocità è costante tra le misurazioni,
Δx=wkΔt
NOTA: questo esercizio è un po' particolare e non facile
Soluzione (Q1)
Per rispondere a Q1 possiamo usare il metodo dei minimi quadrati
- Chiamiamo
αil prodottoCDA. La funzione approssimante è:
fα(v)=12ρv2α
- Quindi, per risolvere il problema definiamo una matrice
Φ:
Φ=(12ρv2112ρv22⋮)
- Quindi troviamo
αrisolvendoΦTΦα=ΦTF
Soluzione (Q2)
Per rispondere a Q2, dobbiamo:
- Associare ad ogni misurazione un valore di forza
- Sommare il lavoro svolto tra ogni coppia di misurazioni
La forza necessaria per avanzare deve bilanciare quella di attrito
- Quindi ad ogni misurazione di gara
kassociamo una forza:
Fk=12ρw2kα
- Dove
αè valore determinato per Q1 - La notazione è stessa della forza di attrito (le due sono uguali)
Soluzione (Q2)
- Otteniamo così un vettore di valori di forza
F... - Associato al vettore di posizioni misurate
x
Il lavoro è così data dall'integrale della forza sullo spostamento
- Possiamo calcolarlo a partire dai vettori
Fex... - ...Utilizzando il metodo dei trapezi
- Formalmente, abbiamo:
E=m−1∑k=112(xk+1−xk)(Fk+1+Fk)
Soluzione (Q3)
Per rispondere a Q3, occorre simulare gli effetti della modifica di α
- Le forze del ciclista sono le stesse (i valori
Fkdi Q2) - Vanno però aggiornati i valori di velocità
- Possiamo ottenere i nuovi valori (siano essi
w′k) risolvendo:
Fk=12ρw′k2910α
- E quindi:
w′k=√21ρ109αFk
Soluzione (Q3)
Con l'ipotesi di velocità costante, possiamo ricalcolare gli spostamenti
- Durante ogni intervallo
k(lungo 5 secondi)... - ...Lo spostamento è dato da:
Δx=(xk+1−xk)=w′kΔt=5w′k
- Quindi sostituendo nella formula del metodo dei trapezi:
E′=m−1∑k=1125w′k(Fk+1+Fk)
Elementi di Informatica e
Applicazioni Numeriche T
Esercizio 3 (Modellazione)
Esercizio 3
Un palla di gomma è posta su un percorso con salite e discese

- Il tratto si compone di due curve polinomiali note A e B:
ϕA(x)=α1x2+α2x+α3ϕB(x)=β1x3+β2x2+β3x+β4
Esercizio 3
Un palla di gomma è posta su un percorso con salite e discese
- La curva A va dal punto
xaal puntoxb - La curva B va dal punto
xbal puntoxc
Esercizio 3
Un palla di gomma è posta su un percorso con salite e discese
- La palla è originariamente nel punto
xa - La palla è soggetta alla forza di gravità
- La palla ha massa
Mnota
Esercizio 3
Si considerino i seguenti problemi:
- Q1: Assumendo che la palla non sia soggetta ad altre forze...
- ...Come determinare l'andamento della posizione delle palla?
- NOTA: si richiedono ambedue le coordinate della posizione
- Q2: Assumendo che la palla, finché è in moto, sia soggetta...
- ...Ad un attrito costante
Frnella direzione della tangente... - ...Dove si ferma la palla?
- ...Ad un attrito costante
- Q3: Come determinare quanta strada fa la palla prima di fermarsi?
NOTE:
- Il fatto che l'attrito sia tangenziale è una facilitazione
- Questo esercizio e difficile
Soluzione (Q1)
Le equazioni delle due curve sono note, quindi;
- Se la coordinata
xdella posizione della palla è nota... - ...La coordinata
ysi può calcolare facilmente:
y=ϕ(x)={ϕA(x) se x≤xbϕB(x) altrimenti
Quindi ci basta determinare l'andamento di x
- La passa costituisce un sistema dinamico
- Quindi possiamo determinare l'andamento della posizione...
- ...Risolvendo un sistema di equazioni differenziali
Soluzione (Q1)
- Descriviamo lo stato con la posizione
xe la velocità tangenzialev - Il sistema di EDO che ne consegue è dato da:
˙x=v1√1+ϕ′(x)2˙v=−gϕ′(x)√1+ϕ′(x)2con: ϕ′(x)={ϕ′A(x) se x≤xbϕ′B(x) altrimenti
˙xè dato dalla proiezione sull'assexdella velocità tangenziale˙vè dato dalla proiezione sulla tangente dig
Soluzione (Q1)
Di fatto, si tratta della EDO che abbiamo visto diverse volte a lezione
- l'unica differenza è che il calcolo delle proiezioni...
- ...è diverso per le due curve A e B
Può essere risolta per esempio con il metodo di Eulero
- Dato un vettore
tdi istanti di tempotk... - ...La soluzione delle EDO sono i vettori
x(tk)ev(tk)
Il vettore x(tk) risponde a Q1
Soluzione (Q2)
Per rispondere a Q2 dobbiamo incorporare Fr nella EDO:
˙x=v1√1+ϕ′(x)2˙v=−gϕ′(x)√1+ϕ′(x)2−1MˆFrcon: ˆFr={Fr se v>0−Fr se v<00 altrimenti
ϕ′(x)è definito come nel caso precedente
Soluzione (Q2)
L'EDO si può risolvere di nuovo con il metodo di Eulero
- La soluzione sono i due vettori
x(tk)ev(tk)
A questo punto, sfruttando l'interpolazione lineare di x(tk) e v(tk):
- Identifichiamo un istante di tempo
t∗tale che:v(t∗)≃0, i.e. la velocità è nulla˙v(t∗)≃0, i.e. l'accelerazione è nulla˙v(t∗)si può calcolare con l'espressione usata per l'EDO- La palla si ferma se sia la velocità che l'accelerazione sono nulle
- NOTA: la lezione registrata contiene un errore in questo punto
- Il valore di
x(t∗)risponde a Q2
Soluzione (Q3)
- Se la palla andasse sempre in avanti (da sx verso dx)
- Allora la strada percorsa sarebbe data da:
L=∫x(t∗)xa√1+ϕ′(x)2dx
Purtroppo però la palla può anche tornare indietro
- Quando la palla si muove da dx verso sx...
- ...Sta ancora percorrendo della strada
Come tenerne conto?
Soluzione (Q3)
Una possibile soluzione: sfruttiamo il vettore x(tk)
- Quando ci spostiamo da
x(tk)ax(tk+1)... - La lunghezza del tratto di curva percorso è approssimativamente:
√(x(tk+1)−x(tk))2+(y(tk+1)−y(tk))2
- Dove
y(tk)=ϕ(x(tk))
Quindi la strada percorsa è data da:
L=n−1∑k=1√(x(tk+1)−x(tk))2+(y(tk+1)−y(tk))2
- Dove
nè il numero di elementi nel vettoret
Elementi di Informatica e
Applicazioni Numeriche T
Esercizio 4 (Analisi)
Esercizio 4
Si consideri lo script seguente:
function y = f(x)
t = x(end:-1:1);
y = x + t;
end
x = f([1, 2, 3, 4])
t = (x == 5)
- Che cosa stampa?
- Si motivi (intuitivamente) la risposta
Soluzione
function y = f(x)
t = x(end:-1:1); % t è x, in ordine invertito
y = x + t;
end
% f([1,2,4,4]) restituisce [1,2,4,4] + [4,4,2,1]
% Quindi viene stampato: [5, 6, 6, 5]
x = f([1, 2, 4, 4])
% (x == 5) restituisce un vettore, che contiene il valore
% per le posizioni in x che soddisfano l'uguaglianza
% Quindi viene stampato: [1, 0, 0, 1]
t = (x == 5)
Elementi di Informatica e
Applicazioni Numeriche T
Esercizio 5 (Analisi)
Esercizio 5
Si consideri lo script seguente:
function y = f(x, v)
t = x(x <= v);
y = sum(t);
end
M = [1, 2, 1, 3, 1, 3];
f(M, 1)
f(M, 2)
- Che cosa stampa?
- Si motivi (intuitivamente) la risposta
Soluzione
function y = f(x, v)
% Se x = [1,2,1,3,1,3] e v è 2
% Allora (x <= v) è [1,1,1,0,1,0]
% E x(x <= v) è [1,2,1,1]
t = x(x <= v);
y = sum(t);
end
M = [1, 2, 1, 3, 1, 3];
f(M, 1) % Stampa sum([1,1,1]), quindi 3
f(M, 2) % Stampa sum([1,2,1,1]), quindi 5
Elementi di Informatica e
Applicazioni Numeriche T
Esercizio 6 (codifica)
Esercizio 6
Si codifichi la funzione:
function x = midpoint(f, x0, t)
Che risolve una EDO con il metodo del punto intermedio
fè una funzione che calcola la derivata dello stato corrente:function dx = f(x, t)xè lo stato (uno scalare),tè l'istante di tempo corrente
x0è il valore iniziale dello stato (uno scalare)tè il vettore dei tempi per cui va determinato lo stato
Si discuta brevemente il metodo
Soluzione
Il metodo del punto intermedio risolve una EDO in base all'iterazione:
x(k+1)=x(k)+(t(k+1)−t(k))f(x(k)m,t(k)m)con: t(k)m=12(t(k+1)+t(k))e: x(k)m=x(k)+(t(k+1)m−t(k))f(x(k),t(k))
t(k)mè l'istante di tempo a metà trat(k)et(k+1)x(k)mè il corrispondente valore dello statox(k)mviene approssimato con il metodo di Eulerof(x(k)m,t(k)m)è la derivata dello stato nel punto intermedio
Soluzione
Una possibile codifica:
function x = midpoint(f, x0, t)
x(1) = x0;
for ii = 1:length(t)-1
tm = t(ii+1) + t(ii); % Punto intermedio
df = f(x(ii), t(ii)); % Derivata in t(ii)
% Ora ottengo lo stato nel punto intermedio
xm = x(ii) + (tm - t(ii)) .* df;
% Prossimo stato
dt = t(ii+1) - t(ii);
x(ii+1) = x(ii) + dt .* f(xm, tm);
end
end